trainFasterRCNNObjectDetector
Train Faster R-CNN deep learning object detector
Syntax
Description
Train a Detector
trainedDetector = trainFasterRCNNObjectDetector(trainingData,network,options)
This function requires that you have Deep Learning Toolbox™. It is recommended that you also have Parallel Computing Toolbox™ to use with a CUDA®-enabled NVIDIA® GPU. For information about the supported compute capabilities, see GPU Computing Requirements (Parallel Computing Toolbox).
[
also returns information on the training progress, such as
training loss and accuracy, for each iteration.trainedDetector,info] = trainFasterRCNNObjectDetector(___)
Resume Training a Detector
trainedDetector = trainFasterRCNNObjectDetector(trainingData,checkpoint,options)
Fine-Tune a Detector
trainedDetector = trainFasterRCNNObjectDetector(trainingData,detector,options)
Additional Properties
trainedDetector = trainFasterRCNNObjectDetector(___,Name,Value)Name,Value pair arguments and
any of the previous inputs.
Examples
Train Faster R-CNN Vehicle Detector
Load training data.
data = load('fasterRCNNVehicleTrainingData.mat'); trainingData = data.vehicleTrainingData; trainingData.imageFilename = fullfile(toolboxdir('vision'),'visiondata', ... trainingData.imageFilename);
Randomly shuffle data for training.
rng(0); shuffledIdx = randperm(height(trainingData)); trainingData = trainingData(shuffledIdx,:);
Create an image datastore using the files from the table.
imds = imageDatastore(trainingData.imageFilename);
Create a box label datastore using the label columns from the table.
blds = boxLabelDatastore(trainingData(:,2:end));
Combine the datastores.
ds = combine(imds, blds);
Set up the network layers.
lgraph = layerGraph(data.detector.Network);
Configure training options.
options = trainingOptions('sgdm', ... 'MiniBatchSize', 1, ... 'InitialLearnRate', 1e-3, ... 'MaxEpochs', 7, ... 'VerboseFrequency', 200, ... 'CheckpointPath', tempdir);
Train detector. Training will take a few minutes. Adjust the NegativeOverlapRange and PositiveOverlapRange to ensure training samples tightly overlap with ground truth.
detector = trainFasterRCNNObjectDetector(ds, lgraph, options, ... 'NegativeOverlapRange',[0 0.3], ... 'PositiveOverlapRange',[0.6 1]);
************************************************************************* Training a Faster R-CNN Object Detector for the following object classes: * vehicle Training on single GPU. Initializing input data normalization. |=============================================================================================================================================| | Epoch | Iteration | Time Elapsed | Mini-batch | Mini-batch | Mini-batch | RPN Mini-batch | RPN Mini-batch | Base Learning | | | | (hh:mm:ss) | Loss | Accuracy | RMSE | Accuracy | RMSE | Rate | |=============================================================================================================================================| | 1 | 1 | 00:00:00 | 0.8771 | 97.30% | 0.83 | 91.41% | 0.71 | 0.0010 | | 1 | 200 | 00:01:15 | 0.5324 | 100.00% | 0.15 | 88.28% | 0.70 | 0.0010 | | 2 | 400 | 00:02:40 | 0.4732 | 100.00% | 0.15 | 92.19% | 0.63 | 0.0010 | | 3 | 600 | 00:04:03 | 0.4776 | 97.14% | 0.09 | 96.88% | 0.59 | 0.0010 | | 3 | 800 | 00:05:23 | 0.5269 | 97.44% | 0.18 | 89.06% | 0.68 | 0.0010 | | 4 | 1000 | 00:06:44 | 0.9749 | 100.00% | | 85.16% | 1.00 | 0.0010 | | 5 | 1200 | 00:08:07 | 1.1952 | 97.62% | 0.13 | 77.34% | 1.27 | 0.0010 | | 5 | 1400 | 00:09:24 | 0.6577 | 100.00% | | 76.38% | 0.72 | 0.0010 | | 6 | 1600 | 00:10:46 | 0.6951 | 100.00% | | 90.62% | 0.94 | 0.0010 | | 7 | 1800 | 00:12:08 | 0.5341 | 96.08% | 0.09 | 86.72% | 0.53 | 0.0010 | | 7 | 2000 | 00:13:26 | 0.3333 | 100.00% | 0.12 | 94.53% | 0.61 | 0.0010 | | 7 | 2065 | 00:13:52 | 1.0564 | 100.00% | | 71.09% | 1.23 | 0.0010 | |=============================================================================================================================================| Detector training complete. *******************************************************************
Test the Faster R-CNN detector on a test image.
img = imread('highway.png');Run the detector.
[bbox, score, label] = detect(detector,img);
Display detection results.
detectedImg = insertShape(img,'Rectangle',bbox);
figure
imshow(detectedImg)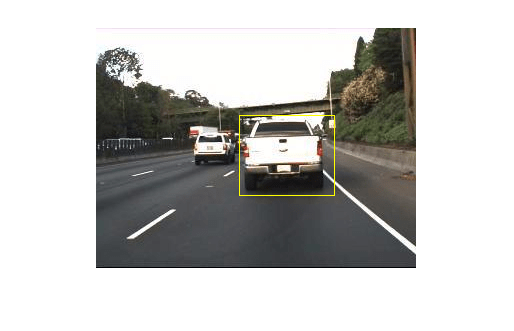
Input Arguments
trainingData — Labeled ground truth
datastore | table
Labeled ground truth, specified as a datastore or a table.
Each bounding box must be in the format [x y width height].
If you use a datastore, your data must be set up so that calling the datastore with the
readandreadallfunctions returns a cell array or table with two or three columns. When the output contains two columns, the first column must contain bounding boxes, and the second column must contain labels, {boxes,labels}. When the output contains three columns, the second column must contain the bounding boxes, and the third column must contain the labels. In this case, the first column can contain any type of data. For example, the first column can contain images or point cloud data.data boxes labels The first column must be images.
M-by-4 matrices of bounding boxes of the form [x, y, width, height], where [x,y] represent the top-left coordinates of the bounding box.
The third column must be a cell array that contains M-by-1 categorical vectors containing object class names. All categorical data returned by the datastore must contain the same categories.
For more information, see Datastores for Deep Learning (Deep Learning Toolbox).
If you use a table, the table must have two or more columns. The first column of the table must contain image file names with paths. The images must be grayscale or truecolor (RGB) and they can be in any format supported by
imread. Each of the remaining columns must be a cell vector that contains M-by-4 matrices that represent a single object class, such as vehicle, flower, or stop sign. The columns contain 4-element double arrays of M bounding boxes in the format [x,y,width,height]. The format specifies the upper-left corner location and size of the bounding box in the corresponding image. To create a ground truth table, you can use the Image Labeler app or Video Labeler app. To create a table of training data from the generated ground truth, use theobjectDetectorTrainingDatafunction.
network — Network
SeriesNetwork object | array of Layer objects | LayerGraph object | network name
Network, specified as a SeriesNetwork (Deep Learning Toolbox), an array of Layer (Deep Learning Toolbox) objects, a layerGraph (Deep Learning Toolbox) object, or by the network
name. The network is trained to classify the object
classes defined in the
trainingData table. To use
SeriesNetwork (Deep Learning Toolbox), Layer (Deep Learning Toolbox), and layerGraph (Deep Learning Toolbox) objects, you must have
Deep Learning Toolbox.
When you specify the network as a
SeriesNetwork, an array ofLayerobjects, or by the network name, the function transforms the network into a Faster R-CNN network by adding a region proposal network (RPN), an ROI max pooling layer, and new classification and regression layers to support object detection. Additionally, theGridSizeproperty of the ROI max pooling layer is set to the output size of the last max pooling layer in the network.The array of
Layer(Deep Learning Toolbox) objects must contain a classification layer that supports the number of object classes, plus a background class. Use this input type to customize the learning rates of each layer. An example of an array ofLayer(Deep Learning Toolbox) objects follows:layers = [imageInputLayer([28 28 3]) convolution2dLayer([5 5],10) reluLayer() fullyConnectedLayer(10) softmaxLayer() classificationLayer()];When you specify the network as
SeriesNetworkobject,Layerarray, or by the network name, the weights for additional convolution and fully connected layers are initialized to'narrow-normal'. The function adds these weights to create the network.The network name must be one of the following valid network names. You must also install the corresponding add-on.
Network Name Feature Extraction Layer Name ROI Pooling Layer OutputSize Description alexnet(Deep Learning Toolbox)'relu5'[6 6] Last max pooling layer is replaced by ROI max pooling layer vgg16(Deep Learning Toolbox)'relu5_3'[7 7] vgg19(Deep Learning Toolbox)'relu5_4'squeezenet(Deep Learning Toolbox)'fire5-concat'[14 14] resnet18(Deep Learning Toolbox)'res4b_relu'ROI pooling layer is inserted after the feature extraction layer. resnet50(Deep Learning Toolbox)'activation_40_relu'resnet101(Deep Learning Toolbox)'res4b22_relu'googlenet(Deep Learning Toolbox)'inception_4d-output'mobilenetv2(Deep Learning Toolbox)'block_13_expand_relu'inceptionv3(Deep Learning Toolbox)'mixed7'[17 17] inceptionresnetv2(Deep Learning Toolbox)'block17_20_ac'The
LayerGraphobject must be a valid Faster R-CNN object detection network. You can use thefasterRCNNLayersfunction to create aLayerGraphobject to train a custom Faster R-CNN network.Tip
If your network is a
DAGNetwork, use thelayerGraph(Deep Learning Toolbox) function to convert the network to aLayerGraphobject. Then, create a custom Faster R-CNN network as described by the Create Faster R-CNN Object Detection Network example.
For more information on creating a Faster R-CNN network, see Getting Started with R-CNN, Fast R-CNN, and Faster R-CNN.
options — Training options
trainingOptions output
Training options, returned by the trainingOptions (Deep Learning Toolbox) function (requires
Deep Learning Toolbox). To specify solver and other options
for network training, use
trainingOptions.
Note
trainFasterRCNNObjectDetector
does not support these training options:
Datastore inputs are not supported when you set the
DispatchInBackgroundtraining option totrue.
Additionally, the function does not support the following training options if you use a combined datastore input:
'once'and'every-epoch'values for 'Shuffle' argument'parallel'and'multi-gpu'values for 'ExecutionEnvironment' argument
checkpoint — Saved detector checkpoint
fasterRCNNObjectDetector object
Saved detector checkpoint, specified as a fasterRCNNObjectDetector object. To
periodically save a detector checkpoint during
training, specify CheckpointPath.
To control how frequently check points are saved see
the CheckPointFrequency and
CheckPointFrequencyUnit
training options.
To load a checkpoint for a previously trained detector, load
the MAT-file from the checkpoint path. For example, if the 'CheckpointPath' property
of options is '/tmp', load
a checkpoint MAT-file using:
data = load('/tmp/faster_rcnn_checkpoint__105__2016_11_18__14_25_08.mat');The name of the MAT-file includes the iteration number and a timestamp indicating when the
detector checkpoint was saved. The detector is saved
in the detector variable of the
file. Pass this file back into the
trainFasterRCNNObjectDetector
function:
frcnn = trainFasterRCNNObjectDetector(stopSigns,...
data.detector,options);detector — Previously trained Faster R-CNN object detector
fasterRCNNObjectDetector object
Previously trained Faster R-CNN object detector, specified as a fasterRCNNObjectDetector object. Use this
syntax to continue training a detector with
additional training data or to perform more training
iterations to improve detector accuracy.
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes.
Example: "PositiveOverlapRange",[0.75 1]
Output Arguments
Tips
To accelerate data preprocessing for training,
trainFastRCNNObjectDetectorautomatically creates and uses a parallel pool based on your parallel preference settings. For more details about setting these preferences, see parallel preference settings. Using parallel computing preferences requires Parallel Computing Toolbox.VGG-16, VGG-19, ResNet-101, and Inception-ResNet-v2 are large models. Training with large images can produce "out-of-memory" errors. To mitigate these errors, try one or more of these options:
Reduce the size of your images by using the '
SmallestImageDimension' argument.Decrease the value of the '
NumRegionsToSample' name-value argument.
This function supports transfer learning. When you input a
networkby name, such as'resnet50', then the function automatically transforms the network into a valid Faster R-CNN network model based on the pretrainedresnet50(Deep Learning Toolbox) model. Alternatively, manually specify a custom Faster R-CNN network by using theLayerGraph(Deep Learning Toolbox) extracted from a pretrained DAG network. For more details, see Create Faster R-CNN Object Detection Network.This table describes how to transform each named network into a Faster R-CNN network. The feature extraction layer name specifies the layer for processing by the ROI pooling layer. The ROI output size specifies the size of the feature maps output by the ROI pooling layer.
Network Name Feature Extraction Layer Name ROI Pooling Layer OutputSize Description alexnet(Deep Learning Toolbox)'relu5'[6 6] Last max pooling layer is replaced by ROI max pooling layer vgg16(Deep Learning Toolbox)'relu5_3'[7 7] vgg19(Deep Learning Toolbox)'relu5_4'squeezenet(Deep Learning Toolbox)'fire5-concat'[14 14] resnet18(Deep Learning Toolbox)'res4b_relu'ROI pooling layer is inserted after the feature extraction layer. resnet50(Deep Learning Toolbox)'activation_40_relu'resnet101(Deep Learning Toolbox)'res4b22_relu'googlenet(Deep Learning Toolbox)'inception_4d-output'mobilenetv2(Deep Learning Toolbox)'block_13_expand_relu'inceptionv3(Deep Learning Toolbox)'mixed7'[17 17] inceptionresnetv2(Deep Learning Toolbox)'block17_20_ac'For information on modifying how a network is transformed into a Faster R-CNN network, see Design an R-CNN, Fast R-CNN, and a Faster R-CNN Model.
During training, multiple image regions are processed from the training images The number of image regions per image is controlled by the
NumRegionsToSampleproperty. ThePositiveOverlapRangeandNegativeOverlapRangeproperties control which image regions are used for training. Positive training samples are those that overlap with the ground truth boxes by 0.6 to 1.0, as measured by the bounding box intersection-over-union metric (IoU). Negative training samples are those that overlap by 0 to 0.3. Choose values for these properties by testing the trained detector on a validation set.Overlap Values Description PositiveOverlapRangeset to[0.6 1]Positive training samples are set equal to the samples that overlap with the ground truth boxes by 0.6 to 1.0, measured by the bounding box IoU metric. NegativeOverlapRangeset to[0 0.3]Negative training samples are set equal to the samples that overlap with the ground truth boxes by 0 to 0.3. If you set
PositiveOverlapRangeto[0.6 1], then the function sets the positive training samples equal to the samples that overlap with the ground truth boxes by 0.6 to 1.0, measured by the bounding box IoU metric. If you setNegativeOverlapRangeto[0 0.3], then the function sets the negative training samples equal to the samples that overlap with the ground truth boxes by 0 to 0.3.Use the
trainingOptions(Deep Learning Toolbox) function to enable or disable verbose printing.
References
[1] Ren, S., K. He, R. Girschick, and J. Sun. "Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks." Advances in Neural Information Processing Systems. Vol. 28, 2015.
[2] Girshick, R. "Fast R-CNN." Proceedings of the IEEE International Conference on Computer Vision, 1440-1448. Santiago, Chile: IEEE, 2015.
[3] Girshick, R., J. Donahue, T. Darrell, and J. Malik. "Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation." Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, 580-587. Columbus, OH: IEEE, 2014.
[4] Zitnick, C. L., and P. Dollar. "Edge Boxes: Locating Object Proposals from Edges." Computer Vision-ECCV 2014, 391-405. Zurich, Switzerland: ECCV, 2014.
Extended Capabilities
Version History
Introduced in R2017aSee Also
Apps
Functions
trainRCNNObjectDetector|trainFastRCNNObjectDetector|trainingOptions(Deep Learning Toolbox) |objectDetectorTrainingData|estimateAnchorBoxes|fasterRCNNLayers
Objects
maxPooling2dLayer(Deep Learning Toolbox) |Layer(Deep Learning Toolbox) |layerGraph(Deep Learning Toolbox) |averagePooling2dLayer(Deep Learning Toolbox) |SeriesNetwork(Deep Learning Toolbox) |fasterRCNNObjectDetector|boxLabelDatastore
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)