undistortFisheyeImage
Correct fisheye image for lens distortion
Syntax
Description
J = undistortFisheyeImage(I,intrinsics)I and returns the result as
image J.
[
also returns a J,camIntrinsics] = undistortFisheyeImage(I,intrinsics)cameraIntrinsics object, which
corresponds to a virtual pinhole camera.
[___] = undistortFisheyeImage(___,
specifies the interpolation method, interp)interp, using the preceding
syntaxes.
[___] = undistortFisheyeImage(___,
specifies one or more Name,Value)Name,Value pair arguments. Unspecified
properties have their default values.
Examples
Correct Fisheye Image for Lens Distortion
Remove lens distortion from a fisheye image by detecting a checkboard calibration pattern and calibrating the camera. Then, display the results.
Gather a set of checkerboard calibration images.
images = imageDatastore('calibrationImages');Detect the calibration pattern from the images. The 'PartialDetections' Name-Value argument is set to true by default allowing detection of partial checkerboards.
[imagePoints,boardSize] = detectCheckerboardPoints(images.Files, 'HighDistortion', true);Generate world coordinates for the corners of the checkerboard squares.
squareSize = 20; % millimeters
worldPoints = generateCheckerboardPoints(boardSize,squareSize);Estimate the fisheye camera calibration parameters based on the image and world points. Use the first image to get the image size.
I = readimage(images,10); imageSize = [size(I,1) size(I,2)]; params = estimateFisheyeParameters(imagePoints,worldPoints,imageSize);
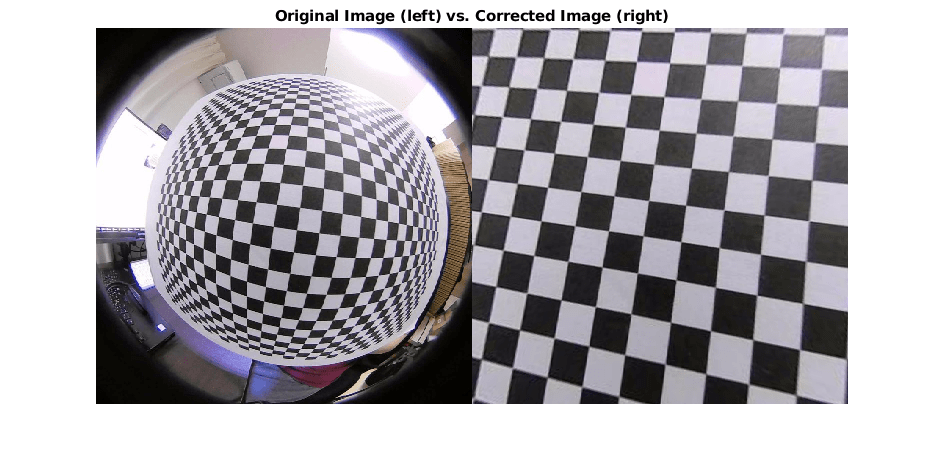
Remove lens distortion from the first image I and display the results.
J1 = undistortFisheyeImage(I,params.Intrinsics); figure imshowpair(I,J1,'montage') title('Original Image (left) vs. Corrected Image (right)') J2 = undistortFisheyeImage(I,params.Intrinsics,'OutputView','same', 'ScaleFactor', 0.2); figure imshow(J2)
title('Output View with low Scale Factor')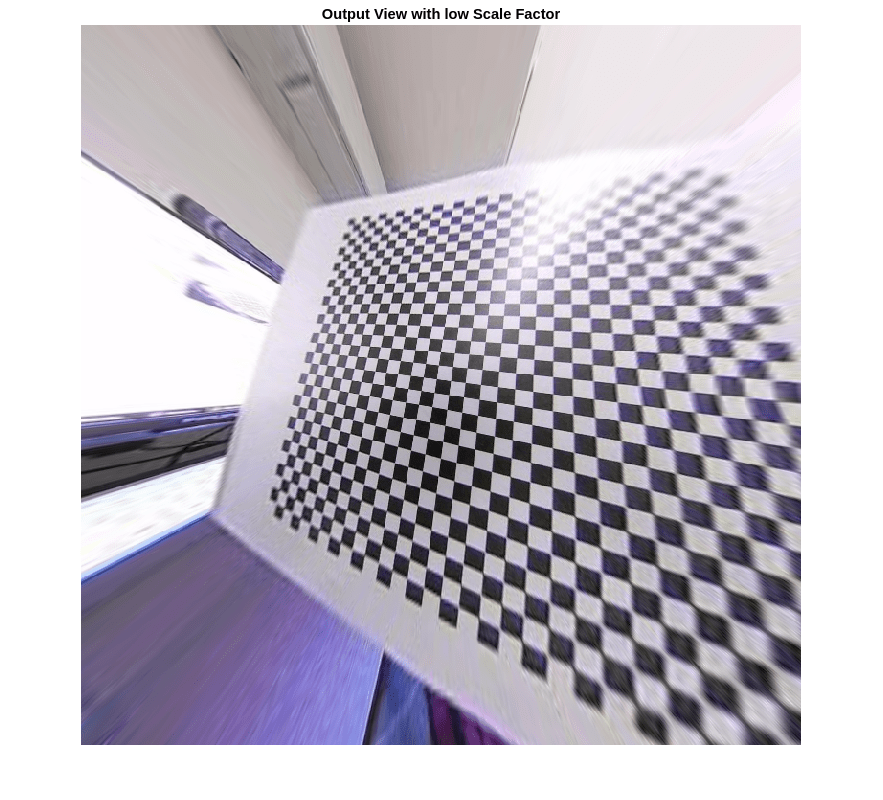
Input Arguments
Output Arguments
Tips
The Computer Vision Toolbox™ calibration algorithm uses the fisheye camera model proposed by Scaramuzza [1].
References
[1] Scaramuzza, D., A. Martinelli, and R. Siegwart. "A Toolbox for Easy Calibrating Omnidirectional Cameras." Proceedings to IEEE International Conference on Intelligent Robots and Systems, (IROS). Beijing, China, October 7–15, 2006.
Extended Capabilities
Version History
Introduced in R2017bYou can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)