J1939 CAN Transport Layer
Transport J1939 messages via CAN
Libraries:
Vehicle Network Toolbox /
J1939 Communication
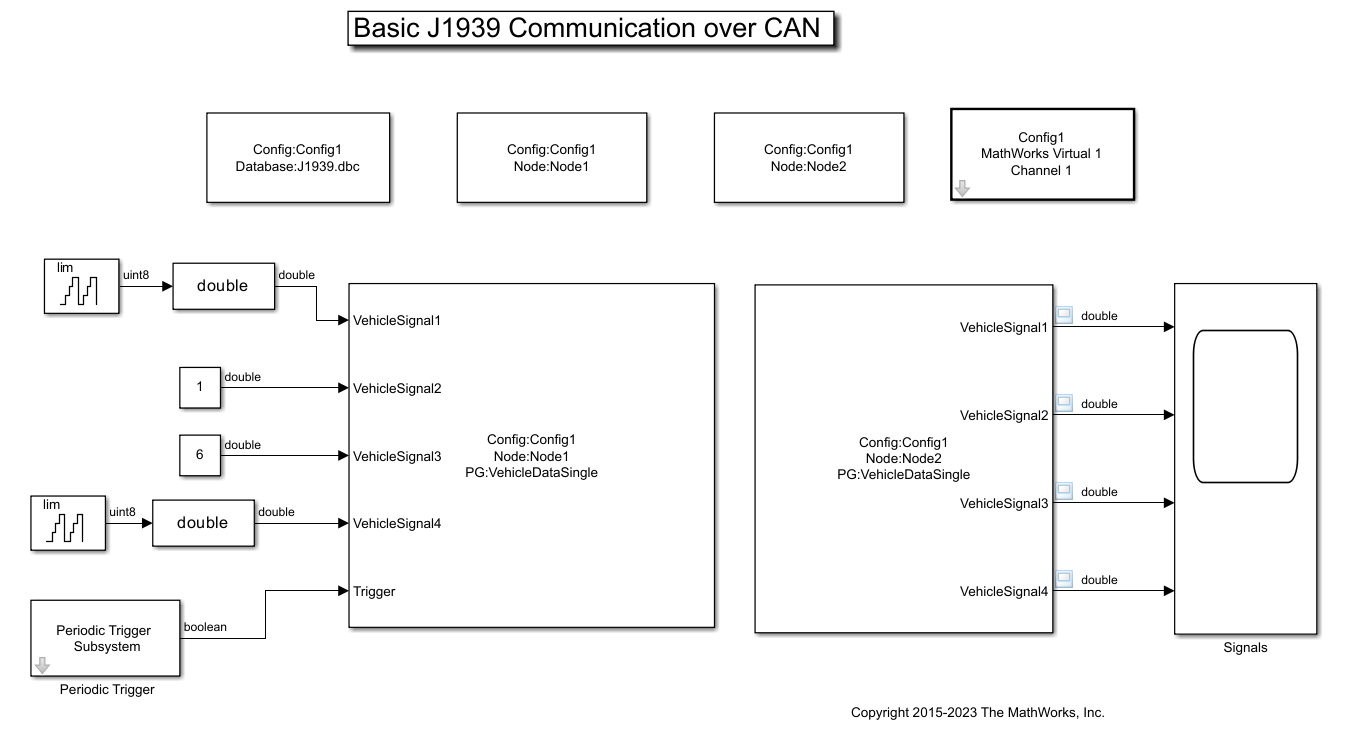
Description
The J1939 CAN Transport Layer block allows J1939 communication via a CAN bus. This block associates a user-defined J1939 network configuration with a connected CAN device. Use one block for each J1939 Network Configuration block in your model.
Other Supported Features
The J1939 communication blocks support the use of Simulink® accelerator and rapid accelerator modes. Using this feature, you can speed up the execution of Simulink models. For more information on this feature, see Acceleration (Simulink).
The J1939 communication blocks also support code generation with limited deployment capabilities. Code generation requires the Microsoft® C++ compiler.
Parameters
Version History
Introduced in R2015b
See Also
Blocks
Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)