MechaWare
Mechatronic Toolkit for High Performance Motion Control
Highlights
- Enables advanced design of smaller, lighter, faster and more precise machines
- Enables complete control of algorithm development without the need for custom firmware
- Supports double-precision math when used with 64-bit ZMP-SynqNet family controllers
- Protects proprietary data via in-house custom algorithm development
- Reduces development time and brings machines to market faster
- Saves thousands of development dollars for OEMs
Description
Designed specifically for motion system design, MechaWare enables software and mechanical engineers to work together to design, test and modify custom motion algorithms in a fraction of the time and cost of conventional methods. MechaWare integrates mechanical systems and control software design resulting in faster design cycles, superior motion system performance, and faster time to market at a fraction of the time and cost of conventional methods. This is significant as it saves OEMs thousands of dollars and months of development time.
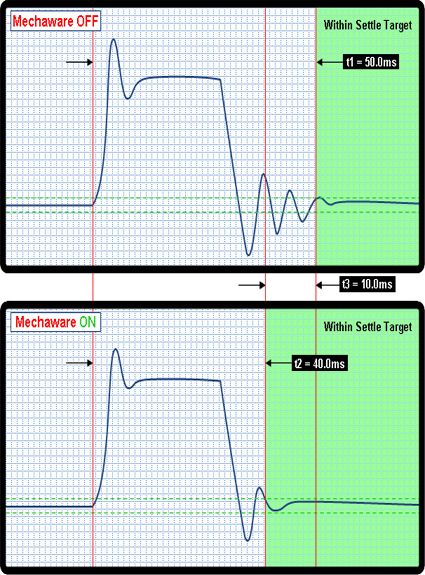
System resonance and vibration control are serious issues in more complex motion systems. Standard control algorithms (PIV and PID) may not provide a sufficient level of motion performance. MechaWare delivers a streamlined workflow between control model development and real-time machine testing through simple integration to MATLAB and Simulink, direct download of run-time code, and test and measurement of real-time machine performance.
Equipped with comprehensive capture, logging and visualization tools that allow mechanical, I/O and software data integration into one measurement environment, MechaWare enables machine designers to take advantage of emerging accelerometer feedback devices. This allows mechanisms to be designed with reduced weight and stiffness, resulting in lighter, faster, smaller and more precise machines.
Included in MechaWare is a library of standard function blocks that reduce the need for specialized knowledge of control theory thereby saving OEMs thousands of dollars for software development. Predefined control 'blocks' are used to develop sophisticated control schemes from PID with feed forwards to complex vibration cancellation methods. MechaWare also allows for multi-axis line-shafting, following, and gearing to be performed quickly with the control block set. It contains a Simulink Blockset and a MechaWare Blockset translator that downloads the model to execute MechaWare blocks real-time on the SynqNet motion controller. Our utility takes a Simulink MDL-file, translates it, and downloads the information in a format that our motion controller can understand and downloads that information to the controller.
How does it work?
- The user builds the control system model in MATLAB & Simulink using MechaWare control blocks.
- The user simulates and tests the model and then compiles and downloads it to the SynqNet motion controller.
- MechaWare insures efficient and predictable motion control performance because the MechaWare function blocks have been optimized for our high performance motion controllers.
Motion Engineering (MEI), a Danaher Motion Company
33 S La Patera Ln
Santa Barbara, CA 93117
UNITED STATES
Tel: 805-681-3300
Fax: 805-681-3333
info@motioneng.com
Required Products
Platforms
- Windows
Support
- Telephone
Product Type
- Industrial Controllers and PLCs
Tasks
- Control Systems
- Embedded Systems
- Process Control and Monitoring
- Vibration Analysis and Control
Industries
- Automotive
- Biotech and Pharmaceutical
- Industrial Automation and Machinery
- Semiconductor