Embedded Coder generates readable, compact, and fast C and C++ code for embedded processors used in mass production. It extends MATLAB Coder and Simulink Coder with advanced optimizations for precise control of the generated functions, files, and data. These optimizations improve code efficiency and facilitate integration with legacy code, data types, and calibration parameters. You can incorporate a third-party development tool to build an executable for turnkey deployment on your embedded system or rapid prototyping board.
Embedded Coder offers built-in support for AUTOSAR, MISRA C®, and ASAP2 software standards. It also provides traceability reports, code documentation, and automated software verification to support DO-178, IEC 61508, and ISO 26262 software development. Embedded Coder code is portable and can be compiled and executed on any processor. In addition, Embedded Coder offers support packages with advanced optimizations and device drivers for specific hardware.
Learn how companies are generating production code with Embedded Coder for controls, signal processing, image processing and computer vision, and machine learning applications.
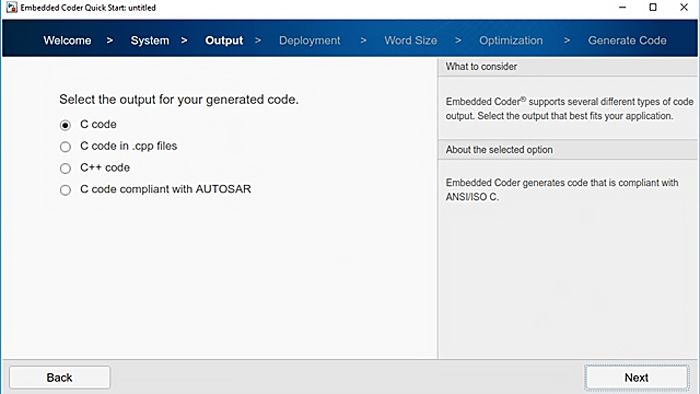
Generate C and C++
Configure and generate code from MATLAB and Simulink using apps, templates, and a command line interface for build scripts.
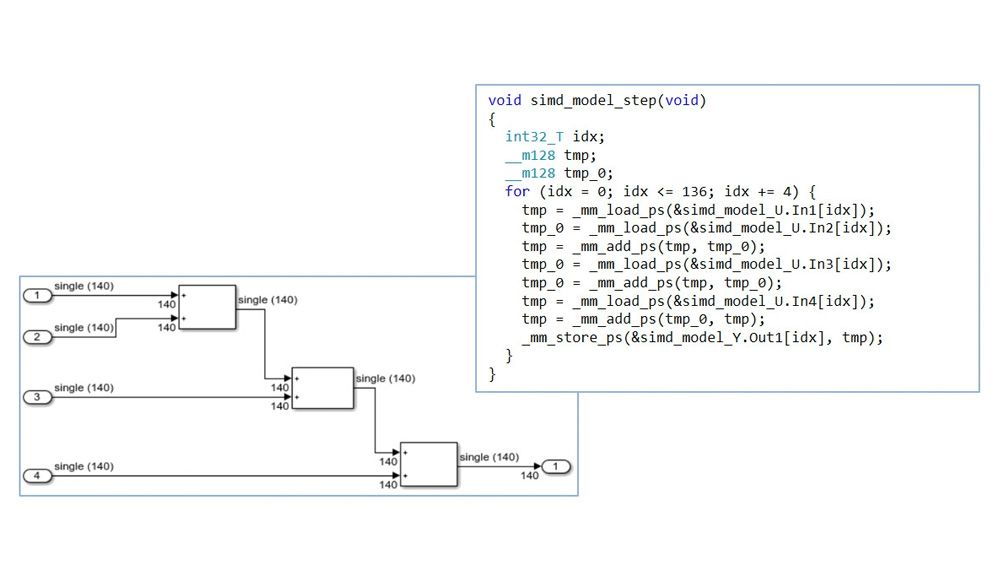
Optimize Embedded Code
Generate optimized, portable C/C++ code or use processor-specific optimizations such as SIMD.
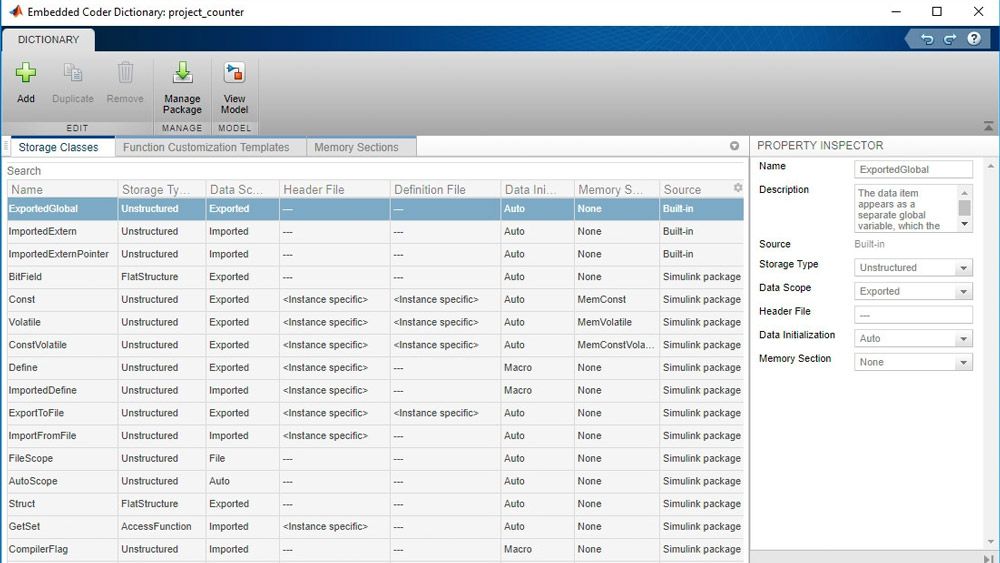
Customize Code Interfaces
Define and control how models appear in the generated code functions and data to facilitate software integration and satisfy coding preferences and standards.
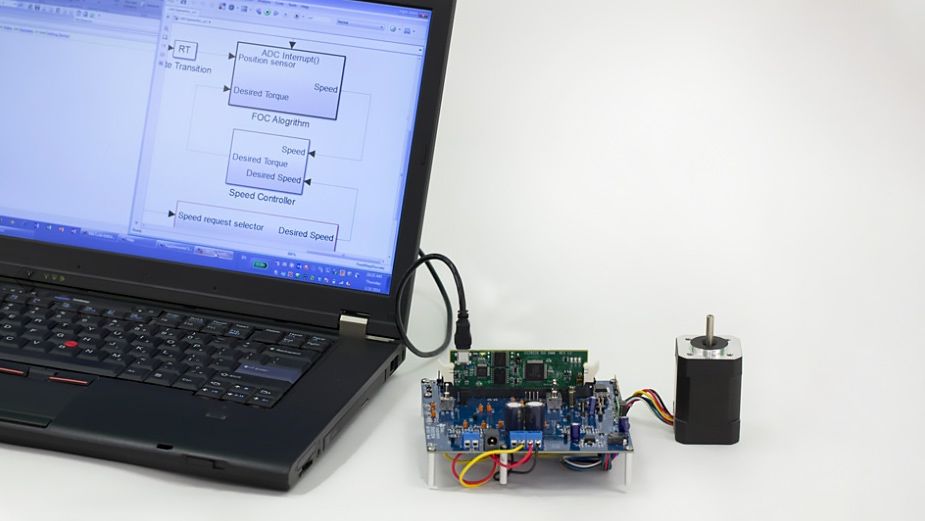
Deploy to Hardware
Generate and integrate code from your algorithms into your IDE or generate complete executables with I/O for popular hardware.
Deploy to Service-Oriented Architectures
Generate and deploy complete applications to middleware and software frameworks that use a service-oriented architecture.
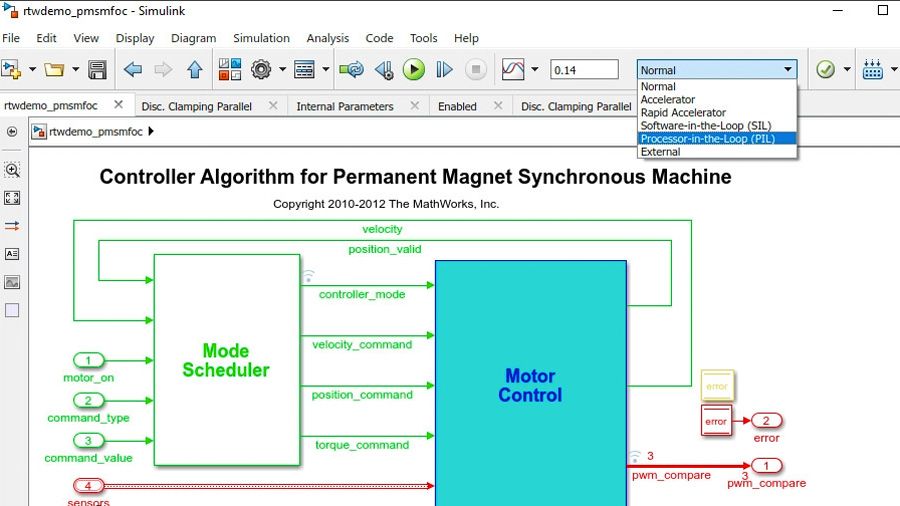
Perform SIL/PIL Testing
Verify code results using software-in-the-loop (SIL) and processor-in-the-loop (PIL) back-to-back testing, measure code coverage, and analyze code execution profiles.
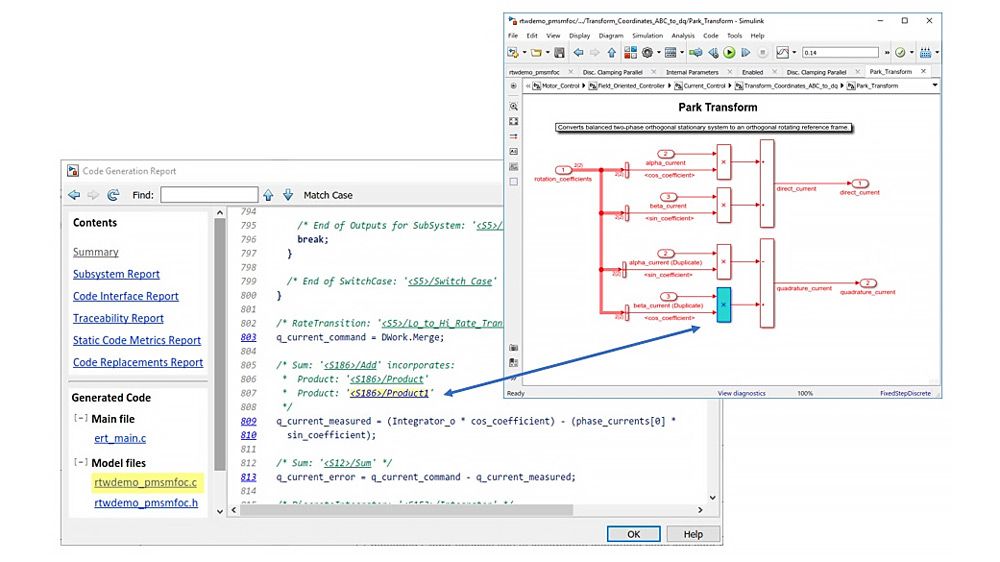
Trace and Assess Code
Produce reports with code size and complexity metrics. Bidirectionally trace code to models and requirements.

Product Resources:

“The code we generated from our Simulink and Stateflow model with Embedded Coder worked from the first try and performed exactly as our model had in field testing.”
Karel Viaene, CNH
What's Next?


You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)