Optimization Toolbox
Solve linear, quadratic, conic, integer, and nonlinear optimization problems
Have questions? Contact Sales.
Have questions? Contact Sales.
Optimization Toolbox provides functions for finding parameters that minimize or maximize objectives while satisfying constraints. The toolbox includes solvers for linear programming (LP), mixed-integer linear programming (MILP), quadratic programming (QP), second-order cone programming (SOCP), nonlinear programming (NLP), constrained linear least squares, nonlinear least squares, and nonlinear equations.
You can define your optimization problem with functions and matrices or by specifying variable expressions that reflect the underlying mathematics. You can use automatic differentiation of objective and constraint functions for faster and more accurate solutions.
You can use the toolbox solvers to find optimal solutions to continuous and discrete problems, perform tradeoff analyses, and incorporate optimization methods into algorithms and applications. The toolbox lets you perform design optimization tasks, including parameter estimation, component selection, and parameter tuning. It enables you to find optimal solutions in applications such as portfolio optimization, energy management and trading, and production planning.
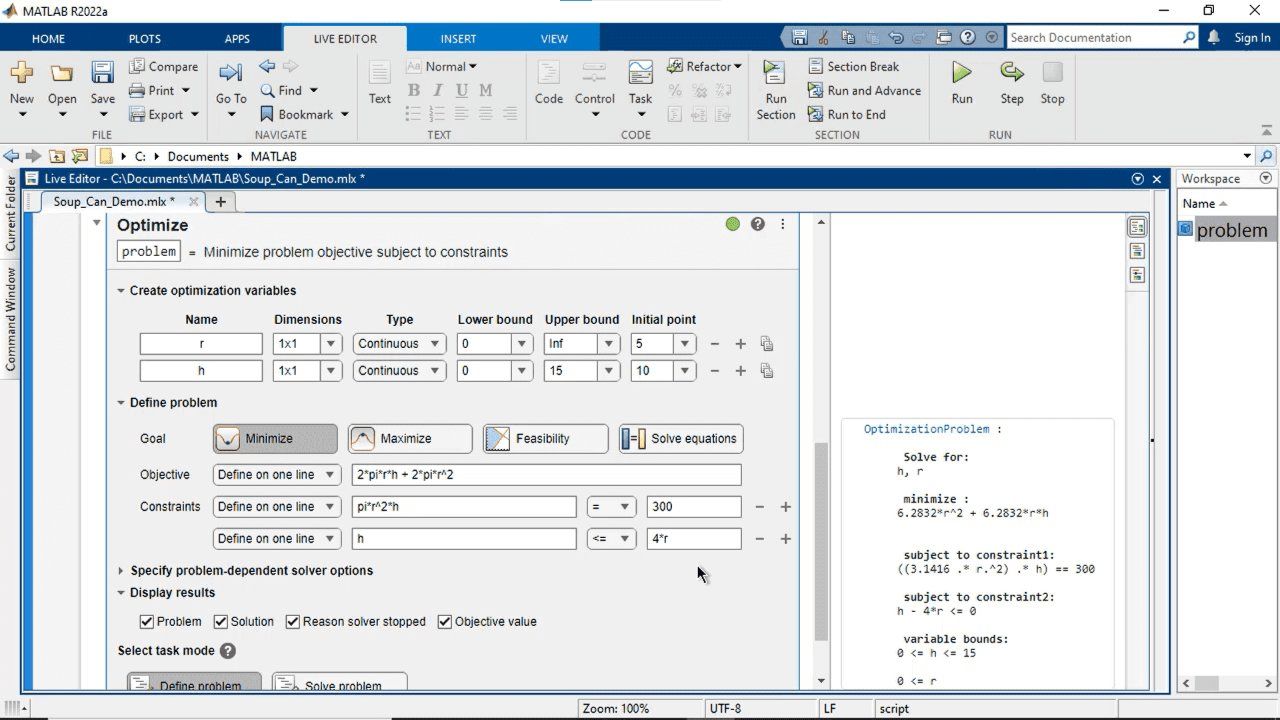
Model a design or decision problem as an optimization problem. Set design parameters and decisions as optimization variables. Use variables to define an objective function to optimize and use constraints to limit possible variable values.
Apply a solver to the optimization problem to find an optimal solution: a set of optimization variable values that produce the optimal value of the objective function, if any, and meet the constraints, if any.
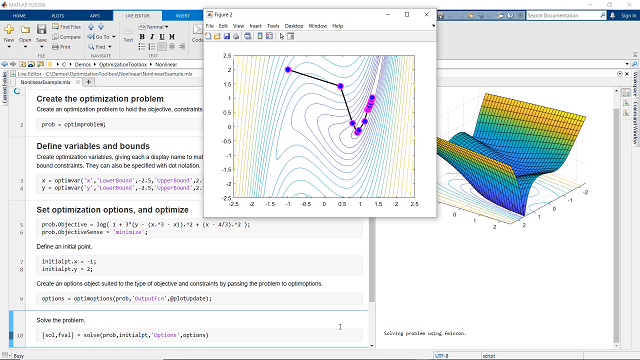
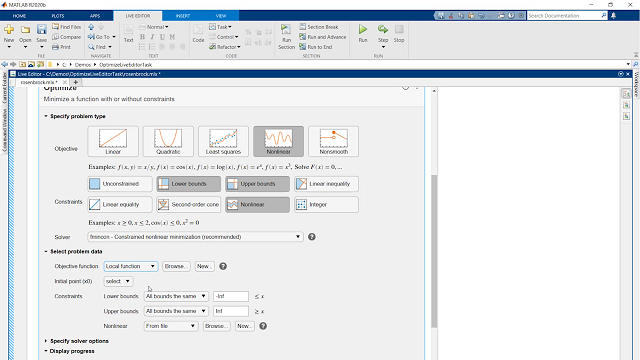
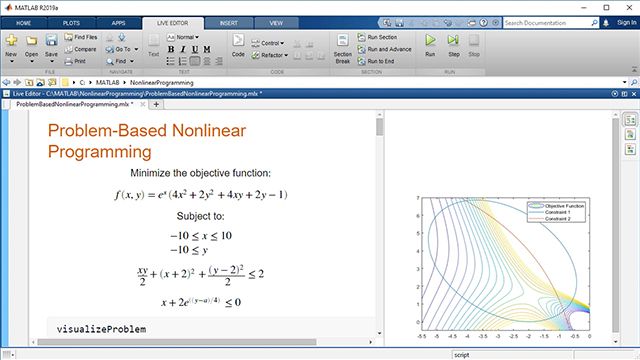
Solve optimization problems that have a nonlinear objective or are subject to nonlinear constraints.

Solve optimization problems that have a linear objective subject to linear constraints with continuous and/or integer variables.

Solve optimization problems with a quadratic objective and linear constraints or problems with second-order cone constraints.

Solve linear and nonlinear least-squares problems subject to bound, linear, and nonlinear constraints.

Solve systems of nonlinear equations subject to bound, linear, and nonlinear constraints.

Solve optimization problems that have multiple objective functions subject to a set of constraints.

Build optimization-based decision support and design tools, integrate with enterprise systems, and deploy optimization algorithms to embedded systems.

“MATLAB has helped accelerate our R&D and deployment with its robust numerical algorithms, extensive visualization and analytics tools, reliable optimization routines, support for object-oriented programming, and ability to run in the cloud with our production Java applications.”
Borislav Savkovic, BuildingIQ
30 days of exploration at your fingertips.
Get pricing information and explore related products.
Your school may already provide access to MATLAB, Simulink, and add-on products through a campus-wide license.
You can also select a web site from the following list
Americas
Europe
Asia Pacific