Simscape Multibody (formerly SimMechanics) provides a multibody simulation environment for 3D mechanical systems, such as robots, vehicle suspensions, construction equipment, and aircraft landing gear. You can model multibody systems using blocks representing bodies, joints, constraints, force elements, and sensors. Simscape Multibody formulates and solves the equations of motion for the complete mechanical system. You can import complete CAD assemblies, including all masses, inertias, joints, constraints, and 3D geometry, into your model. An automatically generated 3D animation lets you visualize the system dynamics.
Simscape Multibody helps you develop control systems and test system-level performance. You can parameterize your models using MATLAB variables and expressions, and design control systems for your multibody system in Simulink. You can integrate hydraulic, electrical, pneumatic, and other physical systems into your model using components from the Simscape family of products. To deploy your models to other simulation environments, including hardware-in-the-loop (HIL) systems, Simscape Multibody supports C-code generation.
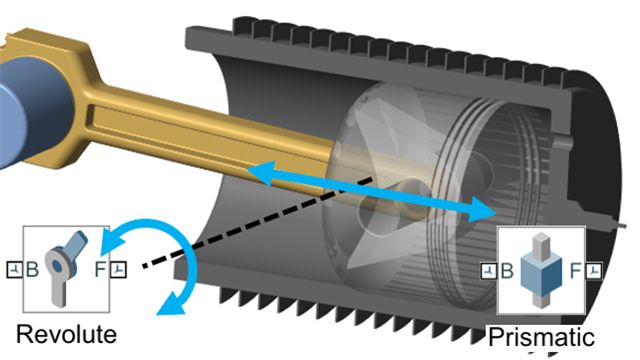
3D Mechanism Simulation
Create multibody models of any 3D mechanism. Define parts using parameterized 3D geometry or CAD data. Connect parts with joints to define degrees of freedom.

CAD Import
Automatically convert CAD designs to create a digital twin of your system. Directly reference files from CATIA®, Creo™, Inventor®, NX™, Solid Edge®, SolidWorks®, and Parasolid®
Electric and Hydraulic Actuation
Connect electronic, hydraulic, pneumatic, and other systems directly to your 3D mechanical model. Evaluate actuator technology to see if it meets performance requirements.
Contact Forces
Model intermittent and persistent contact between parametric and solids defined in CAD software. Define custom force laws. Use tire models for vehicle-to-road contact.
Flexible Bodies
Model flexible bodies using theoretical and finite element modeling methods. Vary properties using MATLAB and see effect of extension, bending, and torsion on the system.
Parametric Design
Use MATLAB to vary design parameters such as length, mass, and voltage. Use dynamic simulation with abstract models to complete mechanical designs in fewer iterations.
Model Deployment
Convert your Simscape model to C code to test control algorithms. Run HIL tests on dSPACE®, Speedgoat, OPAL-RT, and other real-time systems before performing physical tests.
MATLAB and Simulink
Use MATLAB to automate tasks such as model assembly, testing, and post-processing. Use Simulink to integrate control algorithms and hardware design in a single environment.

From Research To Production
Simscape models help you refine requirements, design control systems, test embedded controllers, and support in-service operations as digital twins.
Product Resources:
Simscape Product Family
The Simscape product family provides models and solver technology for simulating physical systems. Model electrical, mechanical, fluid, and other physical systems by assembling components into a schematic.
Simscape
Model and simulate multidomain physical systems
Simscape Electrical
Model and simulate electronic, mechatronic, and electrical power systems
Simscape Battery
Design and simulate battery and energy storage systems
Simscape Fluids
Model and simulate fluid systems
Simscape Driveline
Model and simulate rotational and translational mechanical systems
Simscape Multibody
Model and simulate multibody mechanical systems

“Simulink, Simscape Multibody, and Simulink Coder enabled us to autonomously go from an accurate CAD model of the MRO vehicle into C code that runs in real time.”
Jim Chapel, Lockheed Martin Space Systems
Get a Free Trial
30 days of exploration at your fingertips.
Ready to Buy?
Get pricing information and explore related products.
Are You a Student?
Your school may already provide access to MATLAB, Simulink, and add-on products through a campus-wide license.
What's Next?



You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)