Industrial Robotics and Manufacturing Equipment
Steady pressure to improve the performance and reduce the costs of industrial manufacturing equipment continues. One approach, reducing the mass of the machine, often affects the stiffness of the machine and its ability to control movement accurately. In addition, as machines grow in complexity and provide multiple axes of motion, analyzing and optimizing the integration of the electrical, mechanical, and control systems is often delayed until a complete prototype is built. Any problems found at that stage can set a project back by months, while rebuilds and repeat testing can impact the budget.
Model-Based Design enables engineers to develop a system-level simulation of the mechatronics where engineers can evaluate and optimize the dynamic interaction of the electrical, mechanical, and control systems and its impact on the embedded software. Using code generation capability from MATLAB and Simulink, developers can create real-time simulations for testing the control or signal processing embedded software.
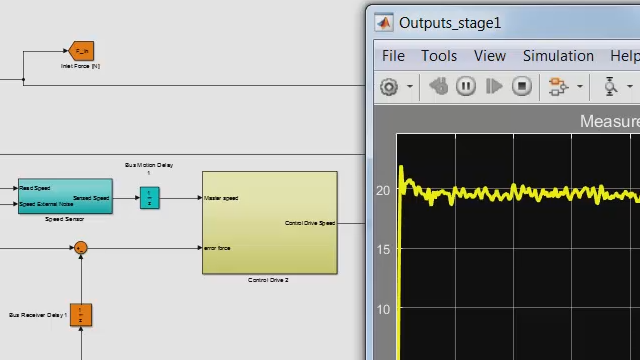
Perform Real-Time Controller Testing Using Rapid Prototyping
Companies developing controllers for industrial equipment can experience the same benefits that manroland did using MATLAB and Simulink software for Model-Based Design. Engineers can reduce controller development time by using real-time simulations to test their control algorithms under operating conditions impractical and dangerous to perform using actual hardware. Once satisfied with their performance, they can quickly deploy the algorithms to the actual controller microprocessor.

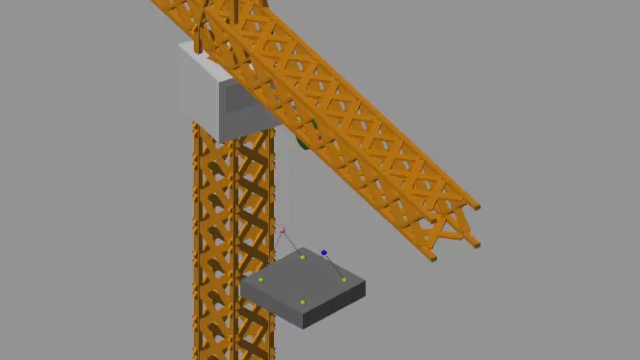
Develop Industrial Robotic Controls in Less Time
Industrial robotics is a classic mechatronic problem, involving integrating mechanical, electrical, and controls system design. MATLAB and Simulink software for physical modeling and control system design help engineers develop multi-axis compensator strategies for precision, vibration-free motion industrial robotic control. Mechanical, electrical, and control systems are simulated in the same software environment making complete system design optimization practical. Integration errors are found earlier in the design process as testing and verification are done using desktop and real-time simulation.


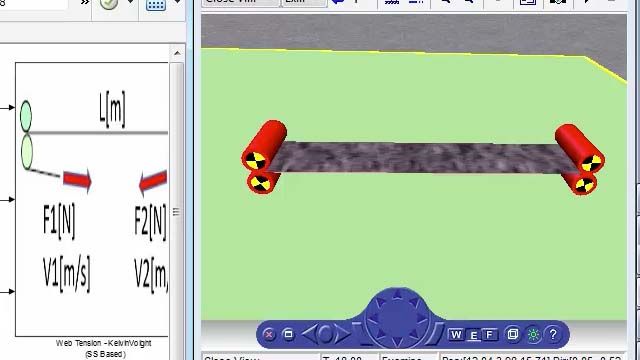
Perform Virtual Commissioning of Production Machines Using Model-Based Design and Code Generation for PLCs
Modern production machines contain an increasingly complex amount of real-time software, typically running on a PLC, PAC, or industrial PC. In order to test and verify the functionality before the physical machine is available, engineers use virtual commissioning based on modeling, simulation, and code generation. Engineers can use MATLAB and Simulink software for physical modeling, including CAD import, to implement the plant model. Simulink® and Stateflow® can help to design, parameterize, and test the closed-loop control software and state machines. Finally, engineers use automatic code generation of real-time C/C++ or IEC 61131-3 ST/LD code to implement the previously tested functionality on a PLC.

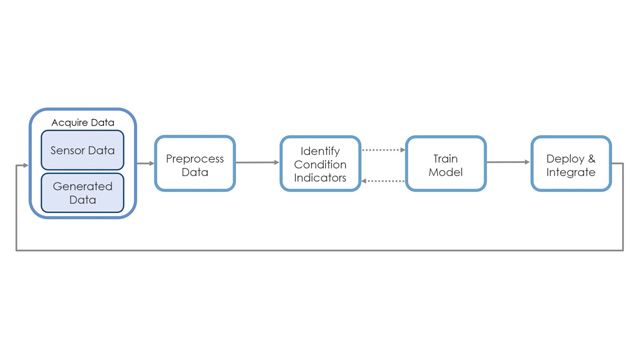
Develop Predictive Maintenance Algorithms for Deployment on PLCs and Other Industrial Controllers
Predictive Maintenance has been gaining increasing appeal due to its potential to reduce unplanned downtimes and increased maintenance costs when industrial equipment breaks. Engineers can use simulation models of industrial systems using Model-Based Design to cover the entire Predictive Maintenance workflow, spanning from data acquisition and pre-processing to design and deployment of the Predictive Maintenance algorithm onto a PLC, and as standalone executable or web application.

You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)