Guidance, Navigation, and Control (GNC)
Model guidance, navigation, and control (GNC) systems,
including controllers
Use guidance blocks to calculate distance between two vehicles, controller blocks to control the movement of vehicles, such as the vehicle path, location, and velocity, and the forces on the vehicle. Use navigation blocks to model accelerometers, gyroscopes, and inertial measurement units (IMU) on each of three axes; an IMU that contains one three-axis accelerometer and one three-axis gyroscope. Implement pilot crossover, precision, and Tustin models.
Categories
- Guidance
Calculate range between two vehicles
- Navigation
Implement three-axis measurement of accelerations, angular rates, inertias
- Control
Simulate various controllers, such as one-dimensional, two-dimensional, three-dimensional types
- Actuators
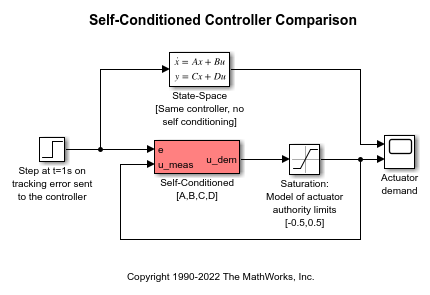
Represent linear and nonlinear actuators with saturation and rate limits
- Pilot Models
Implement pilot models
- Flight Parameters
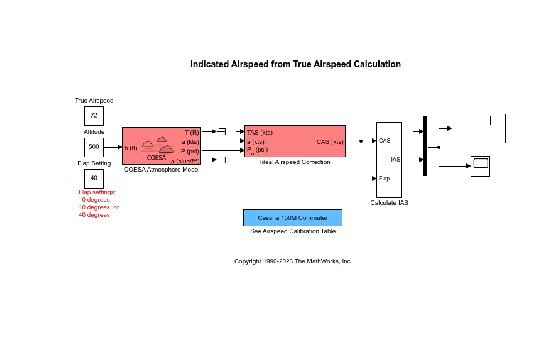
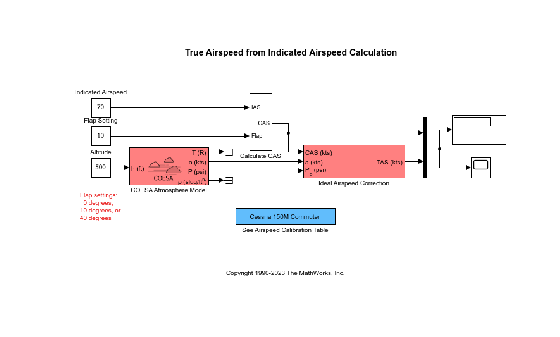
Calculate aerospace parameters such as ideal airspeed correction, Mach number, dynamic pressure
Featured Examples

You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)