Structure of Control System for Tuning with looptune
looptune tunes the feedback loop illustrated
below to meet default requirements or requirements that you specify.
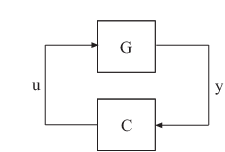
C represents the controller and G represents the
plant. The sensor outputs y (measurement
signals) and actuator outputs u (control
signals) define the boundary between plant and controller. The
controller is the portion of your control system whose inputs are measurements, and
whose outputs are control signals. Conversely, the plant is the remainder—the
portion of your control system that receives control signals as inputs, and produces
measurements as outputs.
For example, in the control system of the following illustration,
the controller C receives the measurement y,
and the reference signal r. The controller produces
the controls qL and qV as outputs.
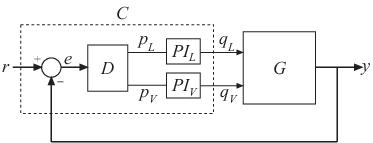
The controller C has a fixed internal structure. C includes
a gain matrix D , the PI controllers PI_L and PI_V,
and a summing junction. The looptune command
tunes free parameters of C such as the gains in D and
the proportional and integral gains of PI_L and PI_V.
You can also use looptune to co-tune free parameters
in both C and G.