Generate RoadRunner Scenario Using Tabular Data for AEB Car-to-Car Testing
This example shows how to create an automated emergency braking (AEB) seed scenario using tabular data and generate variants by varying the speeds of the ego and target vehicles.
In this example, you use scene, lane, actor and event specification tables to create a European New Car Assessment Programme (Euro NCAP®) Car-to-Car Crossing Straight Crossing Path (CCCscp) seed scenario. In this scenario the ego and target vehicles move toward a junction on straight, perpendicular paths, resulting in a collision between the front side of the ego and a side of the target. This example also shows how to generate variants from the seed scenario by varying the ego and target vehicle speeds, keeping the collision point consistent with the seed scenario. The collision point is the position on the ego vehicle at which the ego vehicle and target vehicle collide.
In this example, you:
Create scene, actor, and event specification tables for AEB Car-to-Car testing.
Generate a seed scenario descriptor using tabular data.
Perform parameter variations.
Generate scenario variants and visualize them in RoadRunner.
Create Scenario Specification Tables
This example requires the Automated Driving Toolbox™ Test Suite for Euro NCAP® Protocols support package. Check if the support package is installed.
helperCheckSupportPackageInstalled
Specify the European New Car Assessment Programme Euro NCAP test name for the Safety Assist Automatic Emergency Braking Car-to-Car Crossing Straight Crossing Path (SA AEB CCCscp) test. Generate the Euro NCAP test specifications by using the ncapSpec function.
Note: You can generate tables for various types of Euro NCAP test scenarios by specifying their test names. For more information on Euro NCAP test names, see the ncapSpec function.
ncapTestName = "SA AEB CCCscp";
[variationSpec,ncapTestSpec,specInfo] = ncapSpec(ncapTestName)variationSpec=30×3 table
EgoSpeed PrimaryTargetSpeed PrimaryTargetDirection
________ __________________ ________________________________
0 5.5556 "Nearside Perpendicular"
0 8.3333 "Nearside Perpendicular"
0 11.111 "Nearside Perpendicular"
0 13.889 "Nearside Perpendicular"
0 16.667 "Nearside Perpendicular"
5.5556 5.5556 "Nearside/Farside Perpendicular"
5.5556 8.3333 "Nearside/Farside Perpendicular"
5.5556 11.111 "Nearside/Farside Perpendicular"
5.5556 13.889 "Nearside/Farside Perpendicular"
5.5556 16.667 "Nearside/Farside Perpendicular"
8.3333 5.5556 "Nearside/Farside Perpendicular"
8.3333 8.3333 "Nearside/Farside Perpendicular"
8.3333 11.111 "Nearside/Farside Perpendicular"
8.3333 13.889 "Nearside/Farside Perpendicular"
8.3333 16.667 "Nearside/Farside Perpendicular"
11.111 5.5556 "Nearside/Farside Perpendicular"
⋮
ncapTestSpec = struct with fields:
SceneSpec: [1×1 struct]
ScenarioSpec: [1×1 struct]
SeedScenarioIndex: 30
specInfo = struct with fields:
NCAPTestFullName: "Safety Assist Automatic Emergency Braking Car-to-Car Crossing straight crossing path"
MetaData: [1×1 struct]
EvaluationCriterion: "ImpactVelocity"
ScoringCriterion: [1×1 struct]
Create the scene, lane, actor, and event specification tables by using the helperProcessNCAPSpec helper function.
[sceneData,laneData,actorData,eventData] = helperProcessNCAPSpec(ncapTestSpec,specInfo)
sceneData=5×6 table
RoadElementType Length_Radius DeltaHeading RoadElementID LaneSpecID ParentIntersectionID
___________________ _____________ ____________ _____________ __________ ____________________
"Straight" 600 0 1 1 3
"Straight" 600 0 2 1 3
"SymmetricJunction" 8 NaN 3 NaN NaN
"Straight" 600 0 4 1 3
"Straight" 600 0 5 1 3
laneData=1×4 table
LaneSpecID LeftLaneCount RightLaneCount LaneMarking
__________ _____________ ______________ ______________________
1 1 1 {'Solid,Dashed,Solid'}
actorData=2×8 table
ActorID ActorType ActorName Dimension Heading RelativePosition RoadID LaneID
_______ _________ _________ _______________________________________________________ _______ ________________ ______ ______
1 "Car" "VUT" "4.5556,1.9378,1.4538,0.894,0.9483,2.7133" "Along" "53.6516%,50%" 1 1
2 "Car" "GVT" "4.020000,1.800000,1.430000,0.780000,0.680000,2.560000" "Along" "80.5229%,50%" 4 1
eventData=4×6 table
EventID ActorID EventType Speed Distance EventTrigger
_______ _______ __________________ ______ ________ ____________
1 1 "AcceleratedStart" 16.667 69.444 {'0s' }
2 2 "AcceleratedStart" 16.667 69.444 {'9.3333s' }
3 1 "TurnLeft2" 16.667 NaN {0×0 double}
4 2 "TurnLeft2" 16.667 NaN {0×0 double}
Generate Seed Scenario Descriptor Using Tabular Data
Obtain the road width information from the Euro NCAP test specification table ncapTestSpec.
roadWidth = ncapTestSpec.SceneSpec.RoadWidth;
Create a ScenarioDescriptor object by using the table2scenario function.
seedScenarioDescriptor = table2scenario(sceneData,actorData,eventData,LaneSpec=laneData,roadWidth=roadWidth);
Perform Parameter Variations
Specify the path to your RoadRunner ego asset.
assetPath = fullfile("Vehicles\Sedan.fbx.rrmeta");Specify a subset of 25 variations from the list of all variations variationSpec.
subsetVariationSpec = variationSpec(6:30,:);
Store the property variations in a variationProperties object by using the helperCreateVariationProperties helper function.
variationProperties = helperCreateVariationProperties(seedScenarioDescriptor,subsetVariationSpec,assetPath);
Generate Scenario Variants and Visualize in RoadRunner
Create an array of variant ScenarioDescriptor objects by using the generateVariantsfunction.
variantDescriptors = generateVariants(seedScenarioDescriptor,variationProperties);
Connection status: 1
Connected to RoadRunner Scenario server on localhost:60730, with client id {70e59669-48c6-41cd-b7bb-6b82e45edc0f}
Start the RoadRunner application interactively by using the roadrunnerSetup function. The function opens a dialog box to specify the project folder and installation folder to use when opening RoadRunner. The function returns an object, rrApp, that enables you to perform common workflow tasks in the RoadRunner application, such as opening, closing, and saving scenes and projects.
rrApp = roadrunnerSetup;
Create a RoadRunner scenario from your scenario descriptor object for the first generated variant by using the getScenario function. In this variant, the ego and target vehicles travel with a speed of 20 meters per second.
Note: You can visualize the seed scenario in RoadRunner by using the seedScenarioDescriptor as an input to the getScenario function. You can also visualize other variants by specifying a variantNumber value in the range 1 to 25.
variantNumber = 1;
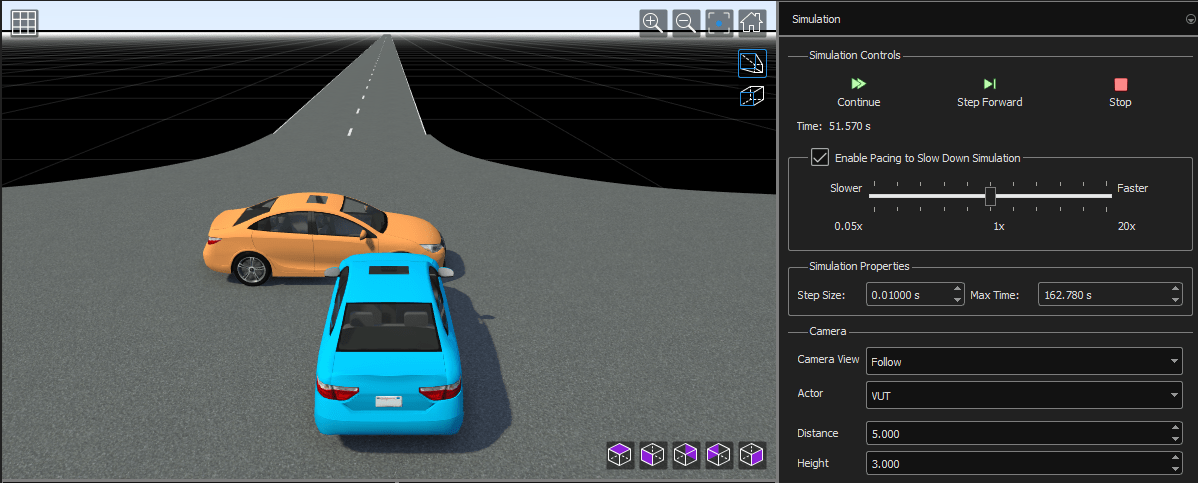
rrSim = getScenario(variantDescriptors(variantNumber),Simulator="RoadRunner",SimulatorInstance=rrApp);To view the scenario from the ego vehicle view or chase view, in the Simulation pane, in the Camera section, set Camera View to Follow or Front. Note that the default value of the Actor attribute is VUT, which is the ego vehicle for the scenario in this example.
set(rrSim,SimulationCommand="Start") while strcmp(get(rrSim,"SimulationStatus"),"Running") pause(1) end
This figure shows the collision of the ego and target vehicle simulated in RoadRunner.
Stop the RoadRunner simulation.
close(rrApp)
Further Exploration
You can also generate scenarios by creating your own scene, lane, actor, and event specification tables. For more information, see the table2scenario function.
You can export the scenario to the ASAM OpenSCENARIO® file format, and use the exported files to visualize it in other simulators like Unreal® and CARLA.
References
[1] European New Car Assessment Programme (Euro NCAP). Test Protocol – AEB Car-to-Car Systems, Version 4.2. Euro NCAP, June 2023. https://cdn.euroncap.com/cars/assets/euro_ncap_aeb_c2c_test_protocol_v42_af2bd7186c.pdf.
See Also
Functions
Topics
- Get Started with Euro NCAP Test Suite
- Generate RoadRunner Scenario Variants by Modifying Actor Assets
- Generate Scenario Variants for Lane Keep Assist Testing
- Generate Scenario Variants for Testing ACC Systems
- Generate Variants of ACC Target Cut-In Scenario
- Automate Testing for Scenario Variants of AEB System
- Generate Scenario Variants for Testing AEB Pedestrian Systems