houghlines
Extract line segments based on Hough transform
Description
lines = houghlines(BW,theta,rho,peaks)BW
associated with particular bins in a Hough transform.
theta and rho are
vectors returned by function hough.
peaks is a matrix returned by the
houghpeaks function that contains the row
and column coordinates of the Hough transform bins to use in
searching for line segments. The return value
lines contains information about the
extracted line segments.
lines = houghlines(___,Name,Value)
Examples
Find Line Segments and Highlight longest segment
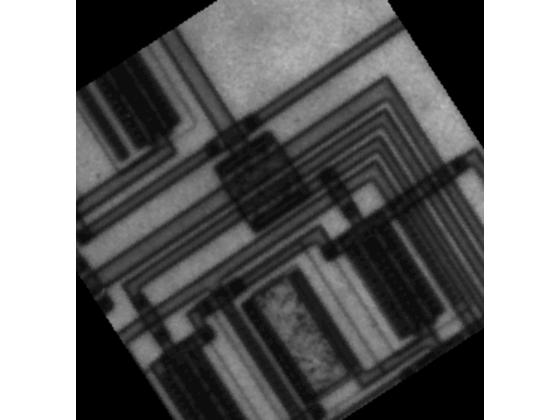
Read image into workspace.
I = imread('circuit.tif');Rotate the image.
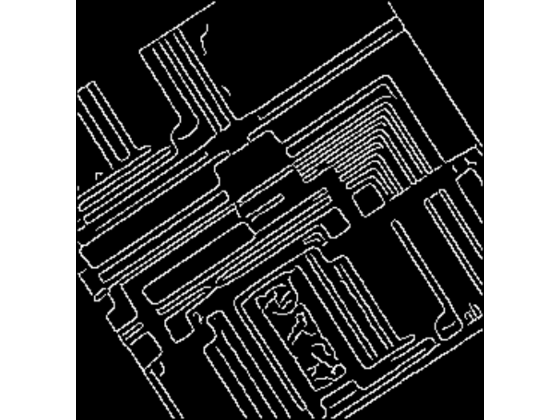
rotI = imrotate(I,33,'crop');Create a binary image.
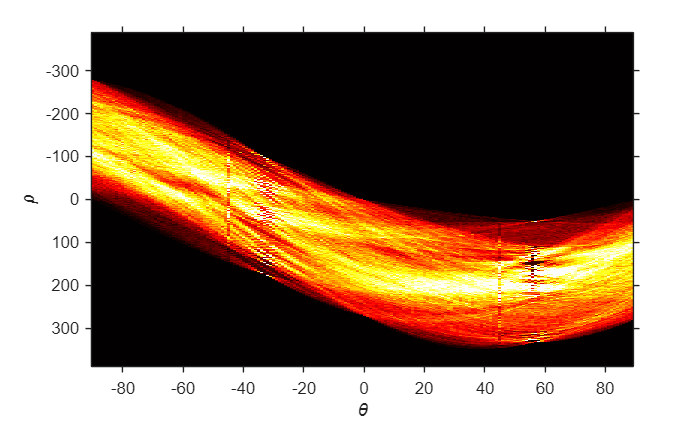
BW = edge(rotI,'canny');Create the Hough transform using the binary image.
[H,T,R] = hough(BW); imshow(H,[],'XData',T,'YData',R,... 'InitialMagnification','fit'); xlabel('\theta'), ylabel('\rho'); axis on, axis normal, hold on;
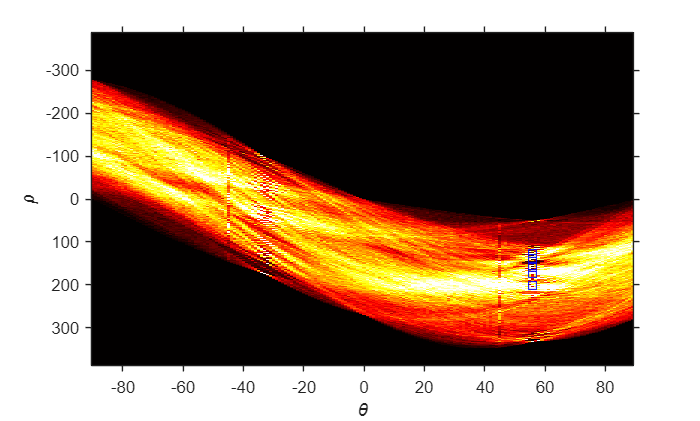
Find peaks in the Hough transform of the image.
P = houghpeaks(H,5,'threshold',ceil(0.3*max(H(:)))); x = T(P(:,2)); y = R(P(:,1)); plot(x,y,'s','color','white');
Find lines and plot them.
lines = houghlines(BW,T,R,P,'FillGap',5,'MinLength',7); figure, imshow(rotI), hold on max_len = 0; for k = 1:length(lines) xy = [lines(k).point1; lines(k).point2]; plot(xy(:,1),xy(:,2),'LineWidth',2,'Color','green'); % Plot beginnings and ends of lines plot(xy(1,1),xy(1,2),'x','LineWidth',2,'Color','yellow'); plot(xy(2,1),xy(2,2),'x','LineWidth',2,'Color','red'); % Determine the endpoints of the longest line segment len = norm(lines(k).point1 - lines(k).point2); if ( len > max_len) max_len = len; xy_long = xy; end end
Highlight the longest line segment by coloring it cyan.
plot(xy_long(:,1),xy_long(:,2),'LineWidth',2,'Color','cyan');
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced before R2006a
See Also
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)