Code Generation Setup
Before You Begin
Simscape™ Multibody™ software supports code generation for fast simulation in the Simulink® environment or for model deployment onto external targets. If your goal is to obtain standalone C/C++ code for real-time simulation on an external target, you must have an active Simulink Coder™ installation.
Solver Selection
Simscape
Multibody models have continuous states and require
a continuous or hybrid Simulink solver. You can change solvers
from the Solver pane of the Model Configuration
Parameters window. Select any solver but that marked discrete
(no continuous states). Consider the ODE1 fixed-step
solver if you need to approximate the behavior of a discrete solver.
Target Selection
The choice of code generation target depends on the Simulink solver
used. If you select a variable-step solver, you must set rsim.tlc as
the system target file. You can specify the system target file from
the Model Configuration Parameters window. Look
for the System target file parameter in the Target
selection area of the Code Generation pane.
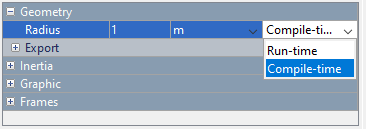
Run-Time Parameters
You can configure most numerical block parameters as Compile-time
(default) or Run-time using a drop-down list that
appears beside configurable parameters. The figure shows the run-time
drop-down list in a solid block dialog box. All parameters are by default
Compile-time. The drop-down list is disabled
when the model is in Fast Restart mode.
Compile-time parameters update in
value when you recompile the model. Leave parameters as Compile-time when
performing tasks that rely on inlined parameters such as model optimization. Run-time parameters
update in value without the need for extra compilations. Set parameters
to Run-time when tuning their values in
Fast Restart mode or when simulating models that rely at least in
part on generated C code.
To set a parameter as Run-time from
the block dialog box, you must configure your Simscape preferences.
Open the MATLAB® Preferences window, select the Simscape node,
and check the Show run-time parameter settings check
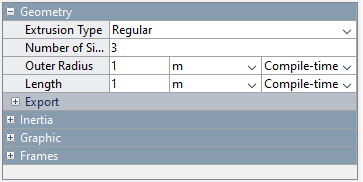
box. Parameters without a run-time option or with a run-time option
that is inactive (i.e., “grayed out”) cannot be configured.
The Length parameter in the figure is an example.
For more information about Simscape run-time parameters, see About Simscape Run-Time Parameters.
Compiler Optimization
You can set your C/C++ compiler to optimize generated code. Optimized code runs faster but compiles slower. Compilation can be especially slow in large models with many bodies. The choice of compiler can exacerbate the slow compilation times. With certain versions of Microsoft Visual C++, Simulink software may appear to hang as the model is compiled.
If a model takes unusually long to compile, consider switching to a different installed compiler or disabling compiler optimization for your model. The Clang compiler provides a suitable alternative to Microsoft Visual C++. You can perform both tasks from the Code Generation menu of the Model Configuration Parameters window.
To switch compilers, in the Toolchain settings area
of the Code Generation menu, set the Toolchain parameter
to a different compiler. To disable code optimization, set the Build
configuration parameter to Faster Builds.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)