Manipulator Modeling
Robot models simulate the kinematic and dynamic properties of manipulator
robots and other rigid body systems. The models are rigidBodyTree objects
containing rigidBody and rigidBodyJoint elements with
joint transformations and inertial properties.
Access predefined models for certain commercial robots, such as Kinova® and KUKA™, using the loadrobot function.
Import existing UDRF or Simscape™
Multibody™ models using importrobot.
Export URDF details in file format from rigid body tree model using exportrobot or create a URDF exporter object using urdfExporter.
Model the motion of the robots using joint- or task-space motion models as
jointSpaceMotionModel and taskSpaceMotionModel objects.
Functions
Blocks
Topics
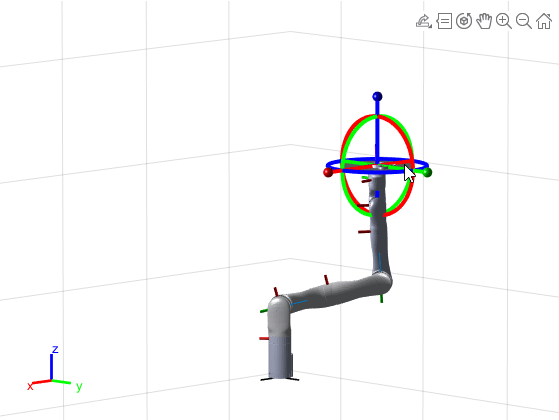
- Rigid Body Tree Robot Model
Explore the structure and specific components of a rigid body tree robot model.
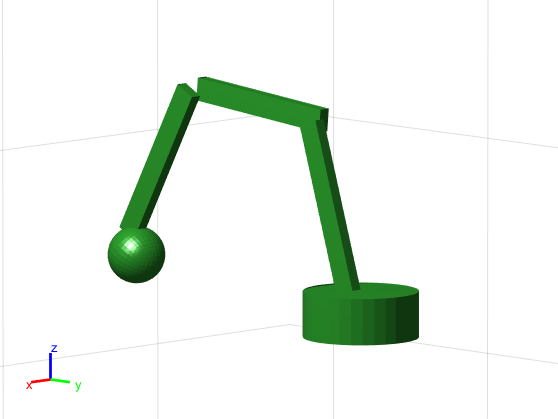
- Build a Robot Step by Step
This example goes through the process of building a robot step by step, showing you the different robot components and how functions are called to build it.
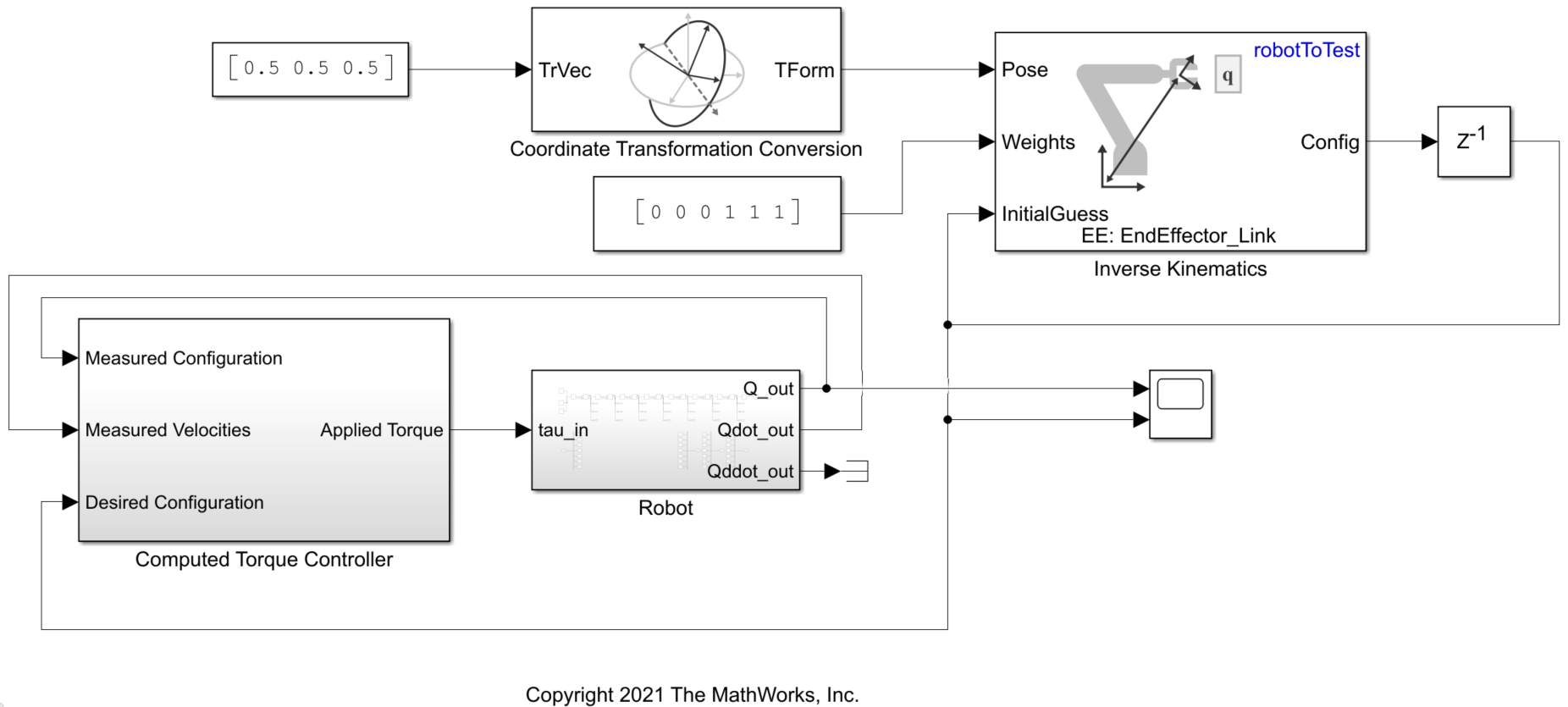
- Joint-Space Motion Model
The joint-space motion model characterizes the motion of a manipulator under closed-loop joint-space position control, as used in the
jointSpaceMotionModelobject and Joint Space Motion Model block. - Task-Space Motion Model
The task-space motion model characterizes the motion of a manipulator under closed-loop task-space position control, as used in the
taskSpaceMotionModelobject and Task Space Motion Model block. - Robot Dynamics
This topic details the different elements, properties, and equations of rigid body robot dynamics.
- Install Robotics System Toolbox Robot Library Data Support Package
Use Add-On to add robot mesh data.
Featured Examples
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)