odometryMotionModel
Description
odometryMotionModel creates an odometry motion model object
for differential drive vehicles. This object contains specific motion model parameters.
You can use this object to specify the motion model parameters in the monteCarloLocalization object.
This motion model assumes that the vehicle makes pure rotation and translation motions
to travel from one location to the other. The model propagates points for either forward
or backwards motion based on these motion patterns. The elements of the
Noise property refer to the variance in the motion. To see the
effect of changing the noise parameters, use showNoiseDistribution.
Creation
Description
omm = odometryMotionModel
Properties
Object Functions
showNoiseDistribution | Display noise parameter effects |
Examples
Predict Poses Based On An Odometry Motion Model
This example shows how to use the odometryMotionModel class to predict the pose of a vehicle. An odometryMotionModel object contains the motion model parameters for a differential drive vehicle. Use the object to predict the pose of a vehicle based on its current and previous poses and the motion model parameters.
Create odometry motion model object.
motionModel = odometryMotionModel;
Define previous poses and the current odometry reading. Each pose prediction corresponds to a row in previousPoses vector.
previousPoses = rand(10,3); currentOdom = [0.1 0.1 0.1];
The first call to the object initializes values and returns the previous poses as the current poses.
currentPoses = motionModel(previousPoses, currentOdom);
Subsequent calls to the object with updated odometry poses returns the predicted poses based on the motion model.
currentOdom = currentOdom + [0.1 0.1 0.05]; predPoses = motionModel(previousPoses, currentOdom);
Show Noise Distribution Effects for Odometry Motion Model
This example shows how to visualize the effect of different noise parameters on the odometryMotionModel class. An odometryMotionModel object contains the motion model noise parameters for a differential drive vehicle. Use showNoiseDistribution to visualize how changing these values affect the distribution of predicted poses.
Create a motion model object.
motionModel = odometryMotionModel;
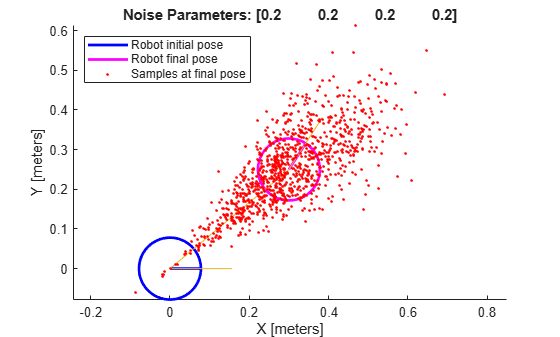
Show the distribution of particles with the existing noise parameters. Each particle is a hypothesis for the predicted pose.
showNoiseDistribution(motionModel);
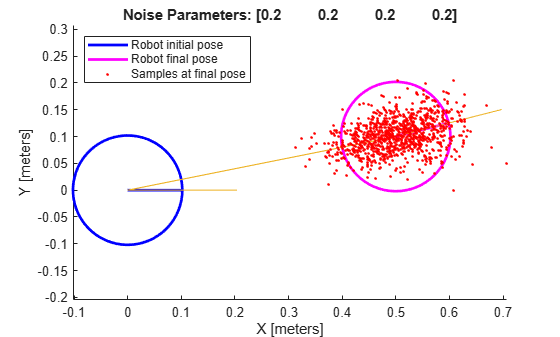
Show the distribution with a specified odometry pose change and number of samples. The change in odometry is used as the final pose with hypotheses distributed around based on the Noise parameters.
showNoiseDistribution(motionModel, ... 'OdometryPoseChange', [0.5 0.1 0.25], ... 'NumSamples', 1000);
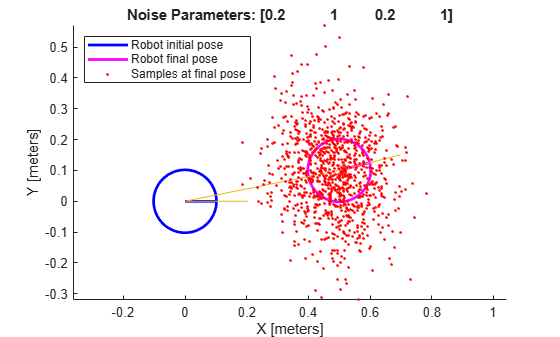
Change the Noise parameters and visualize the effects. Use the same odometry pose change and number of samples.
motionModel.Noise = [0.2 1 0.2 1]; showNoiseDistribution(motionModel, ... 'OdometryPoseChange', [0.5 0.1 0.25], ... 'NumSamples', 1000);
Limitations
If you make changes to your motion model after using it with the
monteCarloLocalization object, call release on
that object beforehand. For example:
mcl = monteCarloLocalization; [isUpdated,pose,covariance] = mcl(ranges,angles); release(mcl) mcl.MotionModel.Noise = [0.25 0.25 0.4 0.4];
References
[1] Thrun, Sebatian, Wolfram Burgard, and Dieter Fox. Probabilistic Robotics. MIT Press, 2005.
Extended Capabilities
Version History
Introduced in R2019b
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)