D-K Iteration Process
You can use the musyn command to design a robust controller for an
uncertain plant, as described in Robust Controller Design Using Mu Synthesis. The algorithm used by
musyn is an iterative process called D-K
iteration. In this process, the function:
Uses H∞ synthesis to find a controller that minimizes the closed-loop gain of the nominal system.
Performs a robustness analysis to estimate the robust H∞ performance of the closed-loop system. This quantity is expressed as a scaled H∞ norm involving dynamic scalings called the D and G scalings (the D step).
Finds a new controller to minimize the scaled H∞ norm obtained in step 2 (the K step).
Repeats steps 2 and 3 until the robust performance stops improving.
Both the D step and K step are mathematically intensive computations. Details of the algorithm follow.
D Step
In the D step, musyn computes the upper bound of the robust H∞ performance for
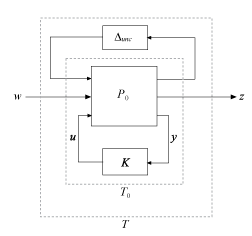
the current controller K. The D step begins with a
robust performance analysis for the closed-loop uncertain system T =
LFT(P,K), as in the following diagram.
Introducing a performance block Δperf transforms the robust-performance analysis of T to a robust-stability analysis of the feedback loop in the following diagram.
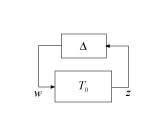
Here, Δ is the augmented uncertainty structure
musyn computes , an upper bound on the robust H∞
performance. To do so, musyn selects a frequency grid {ω1,…,ωN}. For T with complex uncertainty only,
musyn computes at each frequency
ωi
The frequency-dependent matrices D, which commute with Δ, are called D scalings. is the largest result over all frequencies in the grid,
When you use musyn, you can access the results of the
D step in several ways.
The default
musyndisplay shows for each iteration in thePeak MUcolumn.musynreturns for each iteration in thePeakMUfield of theinfooutput argument.musynreturns Di in theDGfield of theinfooutput argument.To visualize the frequency-dependence of Di, set the
'Display'option ofmusynOptionsto'full'.
For additional details about the computation and interpretation of , see Robust Performance Measure for Mu Synthesis.
D-Fitting and Scaled H∞ Performance
musyn fits a rational function
D(s) to the sequence of scalings
{Di}. The fit yields a quantity
μF called the scaled
H∞ performance,
Because the fit is not exact, μF is typically somewhat larger than .
You can access the results of the fit in several ways.
The default
musyndisplay shows μF for each iteration in theDG Fitcolumn.musynreturns μF for each iteration in thePeakMUFitfield of theinfooutput argument.musynreturns the fitting functions in thedranddcfields of theinfooutput argument.To visualize the frequency dependence of the fitting functions, set the
'Display'option ofmusynOptionsto'full'.
K Step
T0 depends on the choice of controller
K by the relation T0 =
LFT(P0,K). Therefore, minimizing μF with
respect to K is a scaled H∞
synthesis problem. Thus, in the K step, musyn uses
hinfsyn or hinfstruct to compute a controller
K* that minimizes
μF. The minimized quantity is the scaled
H∞ norm. For the algorithm to make progress, the
new controller must improve the robust performance obtained in the D
step:
Otherwise, the progress is not sufficient for compensate for fitting errors. Thus
musyn terminates D-K iteration process when
K* does not improve the robust performance
within the tolerance specified by the 'TolPerf' option of
musynOptions.
You can access the results of the K step in several ways.
The default
musyndisplay shows the scaled H∞ norm for each iteration in theK Stepcolumn.musynreturns the new controller in theKof theinfooutput argument, and the corresponding scaled H∞ norm for each iteration in thegammafield.
Mixed Real and Complex Uncertainty
When the system has both real and complex uncertainty and you set the
'MixedMU' option of musynOptions to
'on', musyn uses an additional
G-scaling to improve the computation of . The algorithm in this case is called mixed-μ
synthesis.
For mixed uncertainty, musyn computes and scalings
Dr(ωi),
Dc(ωi),
and
Gcr(ωi)
such that
at each frequency in the grid.
musyn fits the D and G
scaling data by constructing a rational function
such that
dr(s), dc(s), and Ψ(s) are stable with stable inverse.
dr(s) and dc(s) approximate the square roots of the diagonal entries of Dr(ωi) and Dc(ωi).
F approximately satisfies
Finally, the scaled H∞ performance is defined as
where is the transformed system,
For an exact fit of D and G, . Therefore, in general,
Because the transformed system is still a linear fractional function of the controller K, the K step for the mixed-μ case proceeds by computing a controller K* that minimizes .
When using musyn, you can access the D and
G scalings in several ways.
musynreturns the D and G scaling data in theDGfield of theinfooutput argument.musynreturns the fitting functions in thedr,dc, andPSIfields of theinfooutput argument.To visualize the frequency dependence of the scaling data and fitting functions, set the
'Display'option ofmusynOptionsto'full'.
See Also
musyn | musynOptions | musynperf