filtfilt
Zero-phase digital filtering
Description
y = filtfilt(b,a,x)x in both the forward and reverse directions. After
filtering the data in the forward direction, the function matches initial conditions
to minimize startup and ending transients, reverses the filtered sequence, and runs
the reversed sequence back through the filter. The result has these characteristics:
Zero phase distortion
A filter transfer function equal to the squared magnitude of the original filter transfer function
A filter order that is double the order of the filter specified by
banda
filtfilt implements the algorithm proposed by
Gustafsson [1].
Do not use filtfilt with differentiator and Hilbert FIR
filters, because the operation of those filters depends heavily on their phase
response.
y = filtfilt(d,x)x using a digital filter
d. Use designfilt to generate d based on
frequency-response specifications.
Examples
Zero-Phase Filtering of an Electrocardiogram Waveform
Zero-phase filtering helps preserve features in a filtered time waveform exactly where they occur in the unfiltered signal.
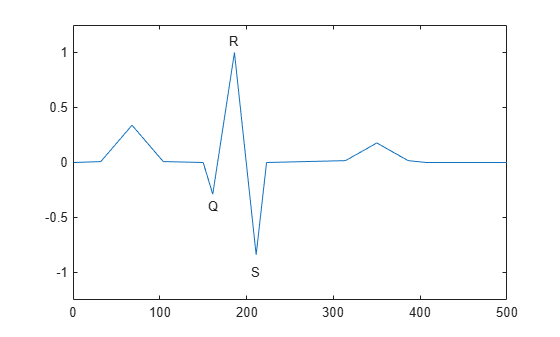
Zero-phase filter a synthetic electrocardiogram (ECG) waveform. The function that generates the waveform is at the end of the example. The QRS complex is an important feature in the ECG. Here it begins around time point 160.
wform = ecg(500); plot(wform) axis([0 500 -1.25 1.25]) text(155,-0.4,"Q") text(180,1.1,"R") text(205,-1,"S")
Corrupt the ECG with additive noise. Reset the random number generator for reproducible results. Construct a lowpass FIR equiripple filter and filter the noisy waveform using both zero-phase and conventional filtering.
rng default x = wform' + 0.25*randn(500,1); d = designfilt("lowpassfir", ... PassbandFrequency=0.15,StopbandFrequency=0.2, ... PassbandRipple=1,StopbandAttenuation=60, ... DesignMethod="equiripple"); y = filtfilt(d,x); y1 = filter(d,x); subplot(2,1,1) plot([y y1]) title("Filtered Waveforms") legend("Zero-phase Filtering","Conventional Filtering") subplot(2,1,2) plot(wform) title("Original Waveform")
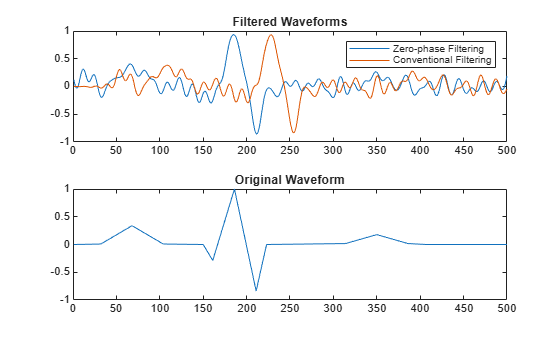
Zero-phase filtering reduces noise in the signal and preserves the QRS complex at the same time it occurs in the original. Conventional filtering reduces noise in the signal, but delays the QRS complex.
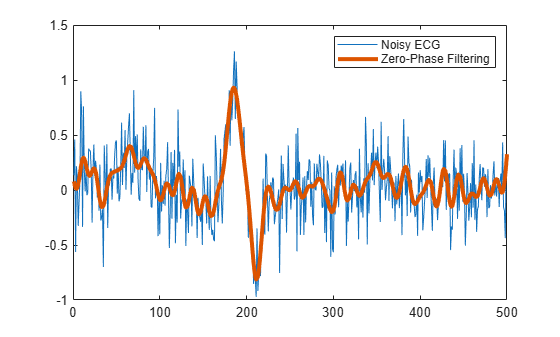
Repeat the filtering using a Butterworth second-order section filter.
d1 = designfilt("lowpassiir",FilterOrder=12, ... HalfPowerFrequency=0.15,DesignMethod="butter"); y = filtfilt(d1,x); subplot(1,1,1) plot(x) hold on plot(y,LineWidth=3) legend("Noisy ECG","Zero-Phase Filtering")
This function generates the ECG waveform.
function x = ecg(L) %ECG Electrocardiogram (ECG) signal generator. % ECG(L) generates a piecewise linear ECG signal of length L. % % EXAMPLE: % x = ecg(500).'; % y = sgolayfilt(x,0,3); % Typical values are: d=0 and F=3,5,9, etc. % y5 = sgolayfilt(x,0,5); % y15 = sgolayfilt(x,0,15); % plot(1:length(x),[x y y5 y15]); % Copyright 1988-2002 The MathWorks, Inc. a0 = [0,1,40,1,0,-34,118,-99,0,2,21,2,0,0,0]; % Template d0 = [0,27,59,91,131,141,163,185,195,275,307,339,357,390,440]; a = a0/max(a0); d = round(d0*L/d0(15)); % Scale them to fit in length L d(15)=L; for i=1:14 m = d(i):d(i+1)-1; slope = (a(i+1)-a(i))/(d(i+1)-d(i)); x(m+1) = a(i)+slope*(m-d(i)); end end
Input Arguments
Output Arguments
References
[1] Gustafsson, F. “Determining the initial states in forward-backward filtering.” IEEE® Transactions on Signal Processing. Vol. 44, April 1996, pp. 988–992. https://doi.org/10.1109/78.492552.
[2] Mitra, Sanjit K. Digital Signal Processing. 2nd Ed. New York: McGraw-Hill, 2001.
[3] Oppenheim, Alan V., and Ronald W. Schafer, with John R. Buck. Discrete-Time Signal Processing. 2nd Ed. Upper Saddle River, NJ: Prentice Hall, 1999.
Extended Capabilities
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)