fircls1
Constrained-least-squares linear-phase FIR lowpass and highpass filter design
Syntax
b = fircls1(n,wo,dp,ds)
b = fircls1(n,wo,dp,ds,'high')
b = fircls1(n,wo,dp,ds,wt)
b = fircls1(n,wo,dp,ds,wt,'high')
b = fircls1(n,wo,dp,ds,wp,ws,k)
b = fircls1(n,wo,dp,ds,wp,ws,k,'high')
b = fircls1(n,wo,dp,ds,...,'design_flag')
Description
b = fircls1(n,wo,dp,ds) generates
a lowpass FIR filter b, where n+1 is
the filter length, wo is the normalized cutoff
frequency in the range between 0 and 1 (where 1 corresponds
to the Nyquist frequency), dp is the maximum passband
deviation from 1 (passband ripple), and ds is the
maximum stopband deviation from 0 (stopband ripple).
b = fircls1(n,wo,dp,ds,'high') generates
a highpass FIR filter b. fircls1 always
uses an even filter order for the highpass configuration. This is
because for odd orders, the frequency response at the Nyquist frequency
is necessarily 0. If you specify an odd-valued n, fircls1 increments
it by 1.
b = fircls1(n,wo,dp,ds,wt) and
b = fircls1(n,wo,dp,ds,wt,'high') specifies
a frequency wt above which (for wt > wo) or below
which (for wt < wo)
the filter is guaranteed to meet the given band criterion. This will
help you design a filter that meets a passband or stopband edge requirement.
There are four cases:
Lowpass:
0<wt<wo<1: the amplitude of the filter is withindpof 1 over the frequency range0< ω <wt.0<wo<wt<1: the amplitude of the filter is withindsof 0 over the frequency rangewt< ω <1.
Highpass:
0<wt<wo<1: the amplitude of the filter is withindsof 0 over the frequency range0< ω <wt.0<wo<wt<1: the amplitude of the filter is withindpof 1 over the frequency rangewt< ω <1.
b = fircls1(n,wo,dp,ds,wp,ws,k) generates
a lowpass FIR filter b with a weighted function,
where n+1 is the filter length, wo is
the normalized cutoff frequency, dp is the maximum
passband deviation from 1 (passband ripple), and ds is
the maximum stopband deviation from 0 (stopband ripple). wp is
the passband edge of the L2 weight function and ws is
the stopband edge of the L2 weight function, where wp < wo < ws. k is the ratio
(passband L2 error)/(stopband L2 error)
b = fircls1(n,wo,dp,ds,wp,ws,k,'high') generates
a highpass FIR filter b with a weighted function,
where ws < wo < wp.
b = fircls1(n,wo,dp,ds,...,' enables
you to monitor the filter design, where design_flag')'design_flag' can
be
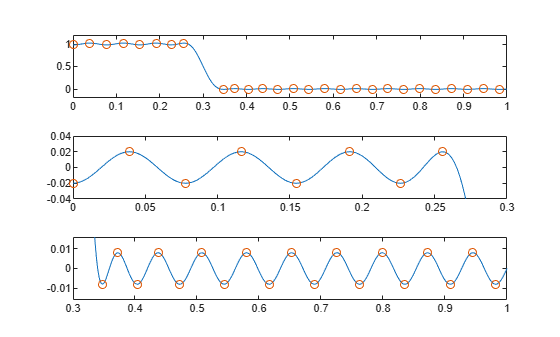
'trace', for a textual display of the design table used in the design'plots', for plots of the filter's magnitude, group delay, and zeros and poles. All plots are updated at each iteration step. The O's on the plot are the estimated extrema of the new iteration and the X's are the estimated extrema of the previous iteration, where the extrema are the peaks (maxima and minima) of the filter ripples. Only ripples that have a corresponding O and X are made equal.'both', for both the textual display and plots
Note
In the design of very narrow band filters with small dp and ds,
there may not exist a filter of the given length that meets the specifications.
Examples
Filter Design with fircls1
Design a 55th-order lowpass filter with normalized cutoff frequency rad/sample. Specify a passband ripple of 0.02 and a stopband ripple of 0.008. Display plots of the bands. The Bound Violations denote the iterations of the procedure as the design converges.
n = 55;
wo = 0.3;
dp = 0.02;
ds = 0.008;
b = fircls1(n,wo,dp,ds,'both'); Bound Violation = 0.0870385343920
Bound Violation = 0.0149343456540
Bound Violation = 0.0056513587932
Bound Violation = 0.0001056264205
Bound Violation = 0.0000967624352
Bound Violation = 0.0000000226538
Bound Violation = 0.0000000000038
Algorithms
fircls1 uses an iterative least-squares algorithm
to obtain an equiripple response. The algorithm is a multiple exchange
algorithm that uses Lagrange multipliers and Kuhn-Tucker conditions
on each iteration.
References
[1] Selesnick, I. W., M. Lang, and C. S. Burrus. “Constrained Least Square Design of FIR Filters without Specified Transition Bands.” Proceedings of the 1995 International Conference on Acoustics, Speech, and Signal Processing. Vol. 2, 1995, pp. 1260–1263.
[2] Selesnick, I. W., M. Lang, and C. S. Burrus. “Constrained Least Square Design of FIR Filters without Specified Transition Bands.” IEEE® Transactions on Signal Processing. Vol. 44, Number 8, 1996, pp. 1879–1892.
Extended Capabilities
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)