residuez
Z-transform partial-fraction expansion
Description
Examples
Partial-Fraction Expansion of IIR Lowpass Filter
Compute the partial-fraction expansion corresponding to the third-order IIR lowpass filter described by the transfer function
Express the numerator and denominator as polynomial convolutions.
b0 = 0.05634; b1 = [1 1]; b2 = [1 -1.0166 1]; a1 = [1 -0.683]; a2 = [1 -1.4461 0.7957]; b = b0*conv(b1,b2); a = conv(a1,a2);
Compute the residues, poles, and direct terms of the partial-fraction expansion.
[r,p,k] = residuez(b,a)
r = 3×1 complex
-0.1153 - 0.0182i
-0.1153 + 0.0182i
0.3905 + 0.0000i
p = 3×1 complex
0.7230 + 0.5224i
0.7230 - 0.5224i
0.6830 + 0.0000i
k = -0.1037
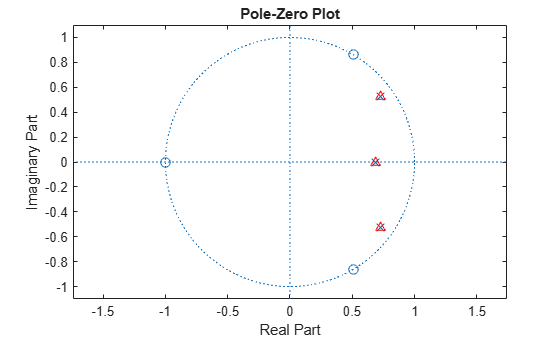
Plot the poles and zeros of the transfer function and overlay the poles you just found.
zplane(b,a) hold on plot(p,'^r') hold off
Use residuez again to reconstruct the transfer function.
[bn,an] = residuez(r,p,k)
bn = 1×4
0.0563 -0.0009 -0.0009 0.0563
an = 1×4
1.0000 -2.1291 1.7834 -0.5435
Input Arguments
Output Arguments
Algorithms
residuez converts a discrete time system, expressed as the ratio of two
polynomials, to partial fraction expansion, or residue, form. It also converts the partial
fraction expansion back to the original polynomial coefficients.
Note
Numerically, the partial fraction expansion of a ratio of polynomials is an ill-posed problem. If the denominator polynomial is near a polynomial with multiple roots, then small changes in the data, including round-off errors, can cause arbitrarily large changes in the resulting poles and residues. You should use state-space or pole-zero representations instead.
residuez applies standard MATLAB® functions and partial fraction techniques to find r,
p, and k from b and
a. It finds
The direct terms
ausingdeconv(polynomial long division) whenlength(b)>length(a)-1.The poles using
p=roots(a).Any repeated poles, reordering the poles according to their multiplicities.
The residue for each nonrepeating pole pj by multiplying b(z)/a(z) by 1/(1 - pjz−1) and evaluating the resulting rational function at z = pj.
The residues for the repeated poles by solving
S2*r2 = h - S1*r1
for
r2using\.his the impulse response of the reduced b(z)/a(z),S1is a matrix whose columns are impulse responses of the first-order systems made up of the nonrepeating roots, andr1is a column containing the residues for the nonrepeating roots. Each column of matrixS2is an impulse response. For each root pj of multiplicity sj,S2contains sj columns representing the impulse responses of each of the following systems.The vector
hand matricesS1andS2haven+xtrarows, wherenis the total number of roots and the internal parameterxtra, set to 1 by default, determines the degree of over-determination of the system of equations.
References
[1] Oppenheim, Alan V., Ronald W. Schafer, and John R. Buck. Discrete-Time Signal Processing. 2nd Ed. Upper Saddle River, NJ: Prentice Hall, 1999.
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)