Algebraic Constraint
Constrain input signal
Libraries:
Simulink /
Math Operations
Description
The Algebraic Constraint block constrains the input signal f(z) to z or 0 and outputs an algebraic state z. The block outputs a value that produces 0 or z at the input. The output must affect the input through a direct feedback path. In other words, the feedback path only contains blocks with direct feedthrough. For example, you can specify algebraic equations for index 1 differential-algebraic systems (DAEs).
Examples
Solve a Linear System of Algebraic Equations
Use the Algebraic Constraint block to solve the system

The model represents the problem in a vectorized form as
![$$ \left[\begin{array}{cc} 1 & 1\\ -1& 1 \end{array}\right]\left[\begin{array}{c}z_1\\z_2\end{array}\right] =\left[\begin{array}{c}1\\1\end{array}\right] $$](../../examples/simulink/win64/SolveALinearSystemOfAlgebraicEquationsExample_eq00627851823494940069.png)
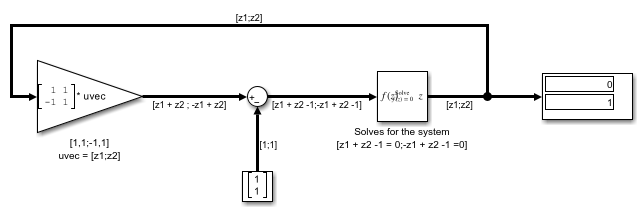
The signal fed to the Algebraic Constraint block  is a
is a  vector of the form
vector of the form
![$$\left[\begin{array}{c}z_1+z_2-1\\-z-1 + z_2-1\end{array}\right] $$](../../examples/simulink/win64/SolveALinearSystemOfAlgebraicEquationsExample_eq14029990663688292877.png)
The block is configured to constrain to 0. Thus solving for  yields the solution
yields the solution 
Extended Examples
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
References
[1] Garbow, B. S., K. E. Hillstrom, and J. J. Moré. User Guide for MINPACK-1. Argonne, IL: Argonne National Laboratory, 1980.
[2] Rabinowitz, P. H. Numerical Methods for Nonlinear Algebraic Equations. New York: Gordon and Breach, 1970.
[3] Kelley, C. T. Iterative Methods for Linear and Nonlinear Equations. Society for Industrial and Applied Mathematics, Philadelphia, PA: 1995.
Extended Capabilities
Version History
Introduced before R2006a
See Also
Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)