Simulate Motion in Six Degrees of Freedom (6DOF)
This example shows how to model six degrees of freedom (6DOF) motion in Simulink® using the 6DOF (Euler Angles) (Aerospace Blockset) or 6DOF (Quaternion) (Aerospace Blockset) blocks. The model replicates the motions experienced by an object or vehicle, including three axes of rotation (pitch, roll, and yaw) and three axes of translation.
This model allows you to analyze the dynamics of aircraft and spacecraft under various conditions without the need for physical prototypes.
Open-Loop Simulation
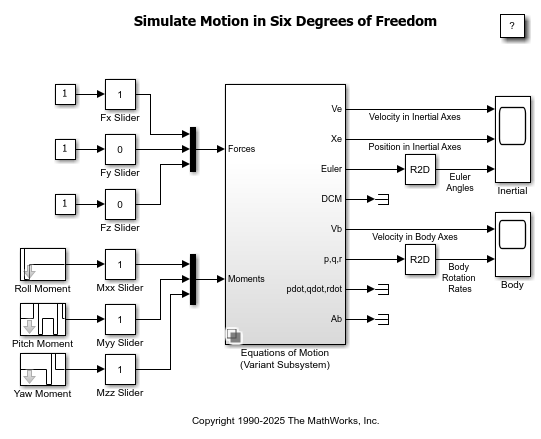
The Equations of Motion subsystem calculates linear and angular accelerations from the total forces and moments acting on the object, such as an aircraft, then integrates these accelerations to determine velocities and positions over time. In an open-loop setup, you can specify simulation inputs, such as control surface positions or engine output, without any feedback from the current state of the system. This method allows you to analyze the behavior of the object under set conditions, and see the effects of specific inputs on the motion of the object. Open-loop simulations allow you to understand system behavior before moving on to more complex closed-loop control systems, where feedback mechanisms adjust inputs based on the state of the system.
The body rotation rates of the Equations of Motion subsystem directly mimic the moment inputs that are fed into the system. These moments are torques applied about the center of mass of the aircraft, influencing its rotational motion around the three axes. You can use these inputs to represent various forces acting on the aircraft, such as aerodynamic forces, engine thrust, or control surface deflections. By accurately modeling these moments, the Equations of Motion subsystem can simulate the response of the aircraft in terms of pitch, roll, and yaw rates, providing a realistic representation of its rotational dynamics.
The Equations of Motion subsystem utilizes a Variant Subsystem to toggle the active choice between the 6DOF (Euler Angles) block and the 6DOF (Quaternion) block.
To trim the aircraft around an operating point, see Airframe Trim and Linearize.


See Also
Topics
- Aerospace Blockset
- Create Aerospace Models (Aerospace Blockset)