Tapped Delay
Delay scalar signal multiple sample periods and output all delayed versions
Libraries:
Simulink /
Discrete
HDL Coder /
Discrete
Description
The Tapped Delay block delays an input by the specified number of sample
periods and provides an output signal for each delay. For example, when you specify
4 for Number of delays and Order
output starting with is Oldest, the block
provides four outputs — the first delayed by four sample periods, the second delayed by
three, and so on. Use this block to discretize a signal in time or resample a signal at
a different rate.
The block accepts one scalar input and generates an output vector that contains data for each incremental delay. Specify the order of the delayed signals in the output vector with the Order output vector starting with parameter:
Oldestorders the output vector starting with the oldest delay version and ending with the newest delay version.Newestorders the output vector starting with the newest delay version and ending with the oldest delay version.
Specify the output vector for the first sampling period with the Initial condition parameter. Careful selection of this parameter can mitigate unwanted output behavior.
Specify the time between samples with the Sample time parameter.
Specify the number of delays with the Number of delays parameter. A
value of -1 instructs the block to inherit the number of delays by
backpropagation. Each delay is equivalent to the z-1
discrete-time operator, which the Unit Delay block represents.
Examples
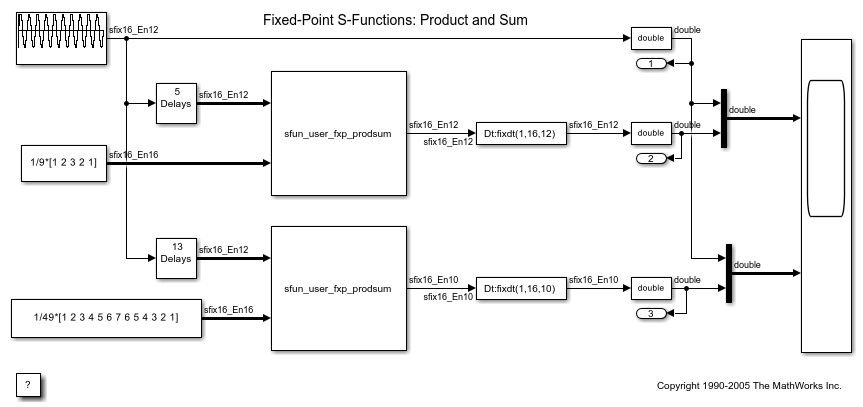
Fixed-Point S-Functions: Product and Sum
How to exercise a custom C language S-function written to compute a fixed-point "product and sum" operation. To see the source code for the S-function, use the right-click context menu to select "Block Parameters". When the dialog box appears, press the Edit button.
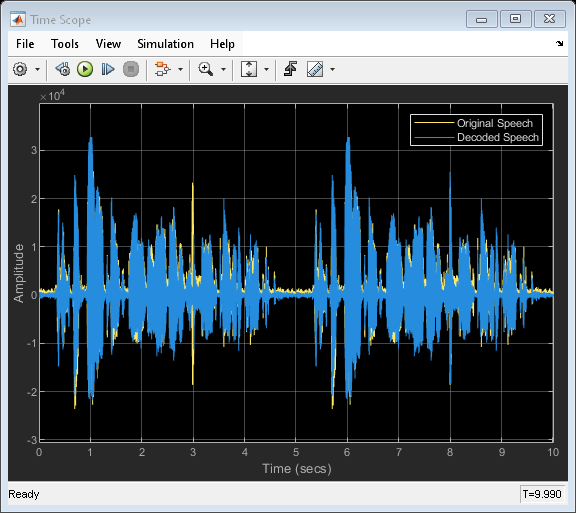
Internet Low Bitrate Codec (iLBC) for VoIP
Implements the Internet Low Bitrate Codec (iLBC) and illustrates its use. iLBC is designed for encoding and decoding speech for transmission via VoIP (Voice Over Internet Protocol).
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|