Validate Linearization In Frequency Domain Using Model Linearizer
This example shows how to validate linearization results using an estimated linear model.
In this example, you linearize a Simulink® model using the I/Os specified in the model. You then estimate the frequency response of the model using the same operating point (model initial condition). Finally, you compare the estimated response to the exact linearization result.
Linearize Model
Open the model.
sys = 'scdDCMotor';
open_system(sys)Open the Model Linearizer app for the model.
In the Simulink model window, in the Apps gallery, click Model Linearizer.
Linearize the model at the default operating point and analysis I/Os, and generate a
bode plot of the result. To do so, click ![]() Bode.
Bode.
The Bode plot of the linearized plant appears, and the linearized plant
linsys1 appears in the Linear Analysis Workspace.
Estimate Frequency Response of Model
For frequency-domain validation of linearization, use a sinestream input signal. By analyzing one sinusoidal frequency at a time, the software can ignore some of the impact of nonlinear effects.
| Input Signal | Use When | See Also |
|---|---|---|
| Sinestream | All linearization inputs and outputs are on continuous signals. | frest.Sinestream |
| Sinestream with fixed sample time | One or more of the linearization inputs and outputs is on a discrete signal | frest.createFixedTsSinestream |
You can create a sinestream signal based on your linearized model. The software uses the linearized model characteristics to accurately predict the number of sinusoid cycles at each frequency to reach steady state.
When diagnosing the frequency response estimation, you can use the sinestream signal to determine whether the time series at each frequency reaches steady state.
Create a sinestream input signal for computing an approximation of the model by
frequency response estimation. On the Estimation tab, in the
Input Signal drop-down list, select
Sinestream.
Initialize the input signal frequencies and parameters based on the linearized model.
In the System drop-down list, select
linsys1. Click Initialize frequencies and
parameters.
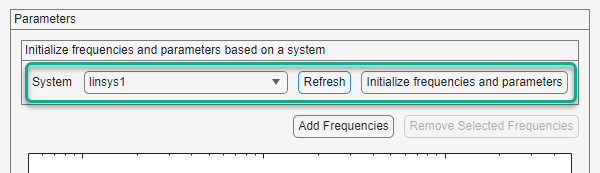
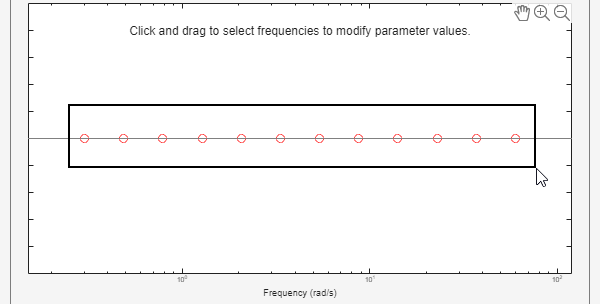
The frequency display in the dialog box is populated with frequency points. The software
chooses the frequencies and input signal parameters automatically based on the dynamics of
linsys1.
Set the amplitude of the input signal at all frequency points to 1. In the frequency display, select all the frequency points.
Enter 1 in the Amplitude field, and click
OK. The new input signal in_sine1 appears in the
Linear Analysis Workspace.
Estimate the frequency response and plot its frequency response on the existing Bode
plot of the linearized system response. Click ![]() Bode Plot 1.
Bode Plot 1.
Examine estimation results
Bode Plot 1 now shows the Bode responses for the estimated model and the linearized model.

The frequency response for the estimated model matches that of the linearized model.
For more information about frequency response estimation, see Frequency Response Estimation Basics.
See Also
Related Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)