slLinearizer
Interface for batch linearization of Simulink models
Description
slLinearizer provides an interface between a Simulink® model and the linearization commands getIOTransfer, getLoopTransfer, getSensitivity, and getCompSensitivity. Use
slLinearizer to efficiently batch linearize a model.
You can configure the slLinearizer interface to linearize a model at a
range of operating points and specify variations for model parameter values. You can use analysis points and permanent openings to obtain
linearizations for any open-loop or closed-loop transfer function from a model. You can then
analyze the stability, or time-domain or frequency-domain characteristics of the linearized
models.
If you add or remove any analysis points or openings or change any other interface
properties, commands that extract linearizations from the slLinearizer
interface recompile the Simulink model.
The model linearization is automatically updated when you change any properties of the
slLinearizer interface. The update occurs when you call commands that query
the linearization stored in the interface, such as getIOTransfer,
getLoopTransfer, getSensitivity, and
getCompsensitivity.
An slLinearizer interface linearizes your Simulink model using the algorithms described in Exact Linearization Algorithm.
Creation
Syntax
Description
sllin = slLinearizer(model)slLinearizer interface for linearizing the Simulink model model and sets the Model
property. The interface adds the linear analysis points marked in the model as analysis points and also adds
the linear analysis points that imply an opening as permanent openings.
sllin = slLinearizer(model,pt)pt to the list of analysis points,
ignoring linear analysis points marked in the model.
sllin = slLinearizer(model,param)Parameters property to param.
sllin = slLinearizer(model,op)OperatingPoints property to op.
sllin = slLinearizer(model,blocksub)BlockSubstitutions property to blocksub. Use
this syntax, for example, to specify a custom linearization for a block. You can also use
this syntax for blocks that do not linearize successfully, such as blocks with
discontinuities or triggered subsystems.
sllin = slLinearizer(model,opt)Options
property to opt.
sllin = slLinearizer(model,pt,op,param,blocksub,options)slLinearizer interface using any combination of
pt, op, param,
blocksub, and options in any order.
If you do not specify pt, the interface adds the linear analysis
points marked in the model as analysis points. The interface also adds linear analysis
points that imply an opening as permanent openings.
Input Arguments
Properties
Object Functions
addPoint | Add signal to list of analysis points for slLinearizer or slTuner interface |
addOpening | Add signal to list of openings for slLinearizer or slTuner interface |
addPoint | Add signal to list of analysis points for slLinearizer or slTuner interface |
getPoints | Get list of analysis points for slLinearizer or slTuner interface |
getOpenings | Get list of openings for slLinearizer or slTuner interface |
getIOTransfer | Transfer function for specified I/O set using slLinearizer or slTuner interface |
getLoopTransfer | Open-loop transfer function at specified point using slLinearizer or slTuner interface |
getSensitivity | Sensitivity function at specified point using slLinearizer or slTuner interface |
getCompSensitivity | Complementary sensitivity function at specified point
using slLinearizer or slTuner interface |
removePoint | Remove point from list of analysis points in slLinearizer or slTuner interface |
removeAllPoints | Remove all points from list of analysis points in slLinearizer or slTuner interface |
removeAllOpenings | Remove all openings from list of permanent openings in
slLinearizer or slTuner interface |
refresh | Resynchronize slLinearizer or slTuner interface
with current model state |
Examples
Create and Configure slLinearizer Interface for Batch Linear Analysis
Create an slLinearizer interface for the scdcascade model. Add analysis points to the interface to extract open-loop or closed-loop transfer functions from the model. Configure the interface to vary parameters and operating points.
Open the scdcascade model.
mdl = "scdcascade";
open_system(mdl);
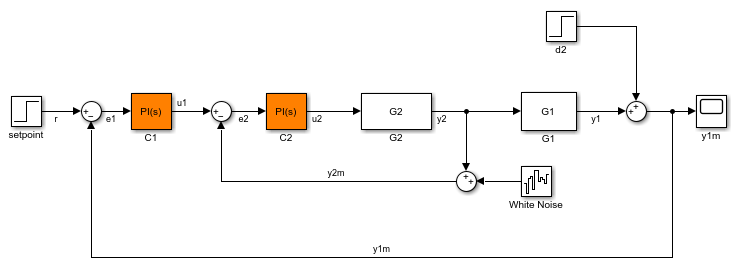
Create an slLinearizer interface for the model. Add the signals r, u1,|u2|, y1,|y2|, y1m, and y2m to the interface.
sllin = slLinearizer(mdl,["r","u1","u2","y1","y2","y1m","y2m"]);
scdcascade contains two PID Controller blocks, C1 and C2. Suppose that you want to vary the proportional and integral gains of C2, Kp2 and Ki2, in the 10% range. Create a structure and specify the parameter variations.
Kp2_range = linspace(0.9*Kp2,1.1*Kp2,3); Ki2_range = linspace(0.9*Ki2,1.1*Ki2,5); [Kp2_grid,Ki2_grid] = ndgrid(Kp2_range,Ki2_range); params(1).Name = "Kp2"; params(1).Value = Kp2_grid; params(2).Name = "Ki2"; params(2).Value = Ki2_grid;
params specifies a 3-by-5 parameter grid. Each point in this grid corresponds to a combination of the Kp2 and Ki2 parameter values.
Specify params as the Parameters property of sllin.
sllin.Parameters = params;
When you use commands such as getIOTransfer, getLoopTransfer, getSensitivity, and getCompSensitivity, the software returns a linearization for each parameter grid point specified by sllin.Parameters.
Suppose that you want to linearize the model at multiple snapshot times, for example at t = {0,1,2}. To do so, configure the OperatingPoints property of sllin.
sllin.OperatingPoints = [0 1 2];
You can also configure the linearization options and specify substitute linearizations for blocks and subsystems in your model.
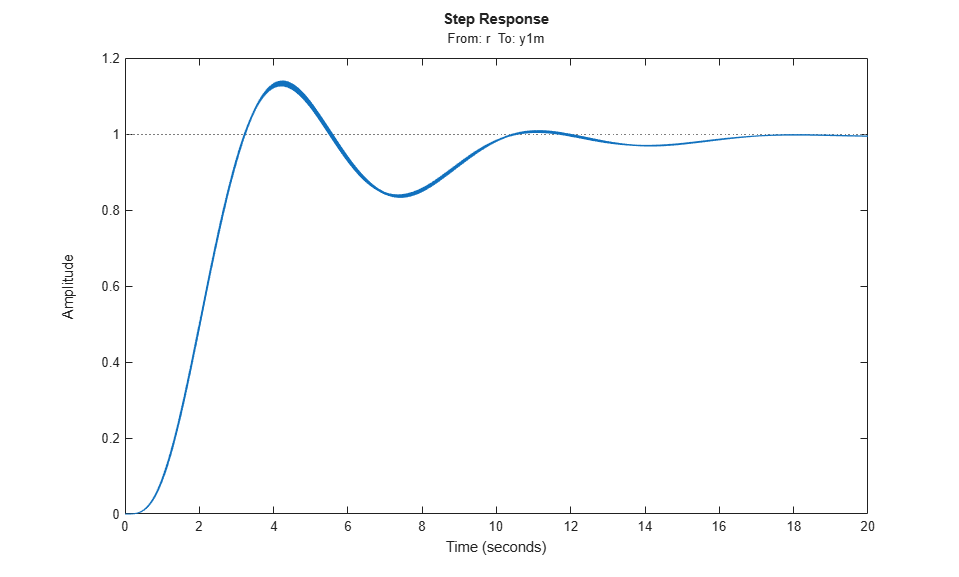
After fully configuring sllin, use the getIOTransfer, getLoopTransfer, getSensitivity, and getCompSensitivity commands to linearize the model as required. For example, extract the transfer function between the reference signal r and the output y1m for each parameter variation and plot their step responses.
T = getIOTransfer(sllin,"r","y1m"); stepplot(T)
Limitations
Linearization is not supported for model hierarchies that contain referenced models configured to use a local solver.
Linearization is not supported for Simscape™ networks configured to use a local solver.
More About
Alternatives
As an alternative to an slLinearizer interface, you can linearize models
using one of the following methods. For examples, see Linearize Simulink Model at Model Operating Point.
To interactively linearize models, use the Model Linearizer app.
To obtain a linear model, you can use the
linearizefunction.
Although both Simulink
Control Design™ software and the Simulink
linmod function perform block-by-block linearization, Simulink
Control Design linearization functionality has a more flexible user interface and uses
Control System Toolbox numerical algorithms. For more information, see Linearization Using Simulink Control Design Versus Simulink.
Version History
Introduced in R2013bSee Also
addPoint | addOpening | getIOTransfer | getLoopTransfer | getSensitivity | getCompSensitivity | linearize
Topics
- What Is Batch Linearization?
- How the Software Treats Loop Openings
- Batch Linearization Efficiency When You Vary Parameter Values
- Batch Compute Steady-State Operating Points for Multiple Specifications
- Specify Parameter Samples for Batch Linearization
- Vary Operating Points and Obtain Multiple Transfer Functions Using slLinearizer Interface
- Vary Parameter Values and Obtain Multiple Transfer Functions
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)