Double Pendulum in Simulink and Simscape Multibody
This example shows two models of a double pendulum, one using Simulink® input/output blocks and one using Simscape™ Multibody™.
The Simulink model uses signal connections, which define how data flows from one block to another. The Simscape Multibody model is built using physical connections, which permit a bidirectional flow of energy between components. Physical connections make it possible to add further stages to the pendulum simply by using copy and paste. Input/output connections require rederiving and reimplementing the equations.
The initial angle for each joint is defined by a MATLAB® variable. The annotations on the Integrator blocks show the initial angles of the joints with respect to the world frame.
Model

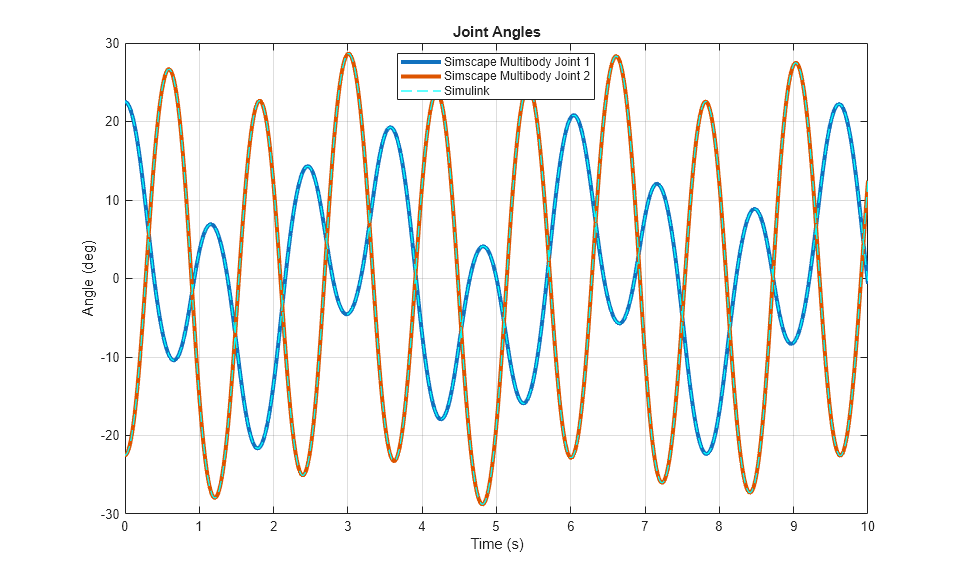
Simulation Results from Simscape Logging
See Also
Related Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)