Counting Degrees of Freedom
The number and types of joints, gears, and constraints in a mechanism partially determine its mobility—the total number of degrees of freedom, or DOFs, that the mechanism provides and therefore the minimum number of input variables needed to fully constrain its configuration. The mobility F of a mechanism with N bodies and j joints, each with f DOFs follows from expressions such as the Kutzbach criterion, which for a planar mechanism states:
Applying this criterion to a four-bar linkage, an assembly of four bodies (n = 4) and four joints (j = 4) with one rotational DOF each (fi = 1), yields a mobility of one DOF—indicating that a single input variable suffices to fully control the linkage configuration. As mechanisms grow in complexity, manually calculating total DOFs becomes more time-consuming, so Simscape™ Multibody™ automatically computes them for you.
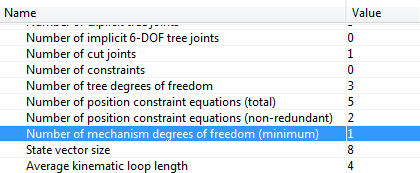
You can view the mechanism DOFs through the Simscape Statistics Viewer, shown below for the four-bar featured example. You
open the Statistics Viewer. In the Apps gallery, click
Simscape Variable Viewer. Enter
openExample("sm/FourBarExample") at the MATLAB® command prompt to open the four-bar model and view its DOFs through
the Statistics Viewer.