Creating a Robotic Gripper Multibody in MATLAB
This example constructs a robotic gripper multibody in MATLAB®. It demonstrates how various classes under simscape.multibody.* package can be used to build a hierarchical multibody system.
The gripper has a palm which is a RigidBody component and has fingers which are themselves Multibody components. Each of the articulated finger multibody comprises of rigid finger segments connected via revolute joint knuckles.
To construct the gripper, run the following code in MATLAB:
import simscape.Value; % Number of fingers numFingers = 5; % Palm dimensions palmDims = Value([8 40], 'mm'); % Finger segment number and dimensions segmentDims = Value([30 8; ... % Proximal segment 30 6; ... % Middle segment 40 5], ... % Distal segment 'mm'); % Finger tip dimensions tipRad = Value(9, 'mm'); % Finger bend angles bendAngles = Value([-30, +30, +25], 'deg'); % Finger segment colors colors = [0 0 .7; ... % Palm .5 .4 0; ... % Proximal segment .8 .6 0; ... % Middle segment 1 .9 0; ... % Distal segment 1 1 1]; % Tip % Construct the gripper [gripper, gripper_op] = robotGripper(numFingers, palmDims, segmentDims, tipRad, bendAngles, colors); % Visualize the gripper cmb = compile(gripper); visualize(cmb,computeState(cmb,gripper_op),'vizGripper');
To perform any simulation workflows, a simulink model can be created from the gripper multibody object using its makeBlockDiagram method.
makeBlockDiagram(gripper,gripper_op,'gripperModel');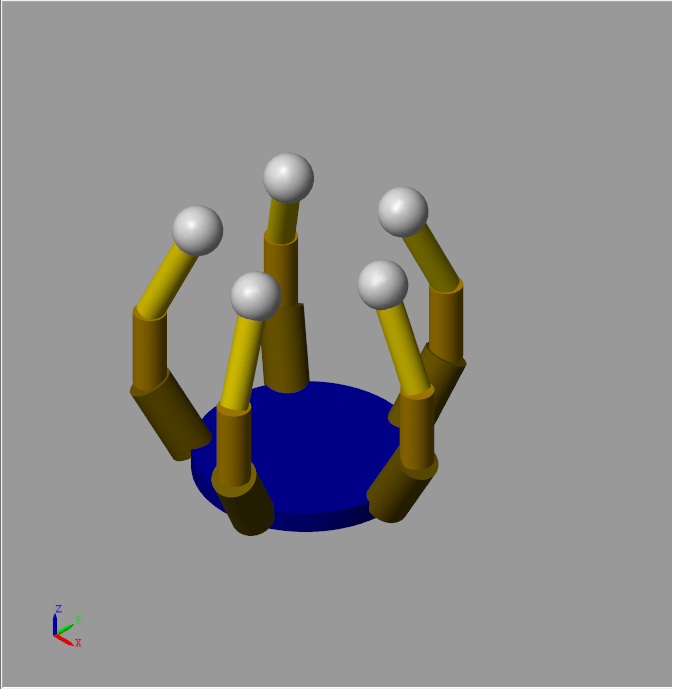
See Also
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)