State-Feedback Controller
Discrete-time state-feedback controller with integral action
Libraries:
Simscape /
Electrical /
Control /
General Control
Description
The State-Feedback Controller block implements a discrete-time state-feedback controller with integral action. Use this block to control linear systems with single or multiple inputs and single or multiple outputs. The integral action serves to eliminate steady-state error in the controlled outputs. You can define the controller using a precomputed optimal gain or use the state-space model of your system to generate this gain using pole placement.

Equations
The integral of the tracking error, xi, is an additional state that ensures zero steady-state error for the closed-loop system. The extended state vector is
Where:
x is the state vector.
xi is the integral of the tracking error.
xe is the extended state vector.
Therefore, the control action is
Where:
K is the feedback matrix, that is, the pole placement.
u is the controller output.
Assumptions
System state measurement and estimation occur outside the controller.
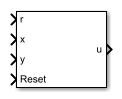
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2017b
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)