Switched Reluctance Motor Parameterized with FEM Data
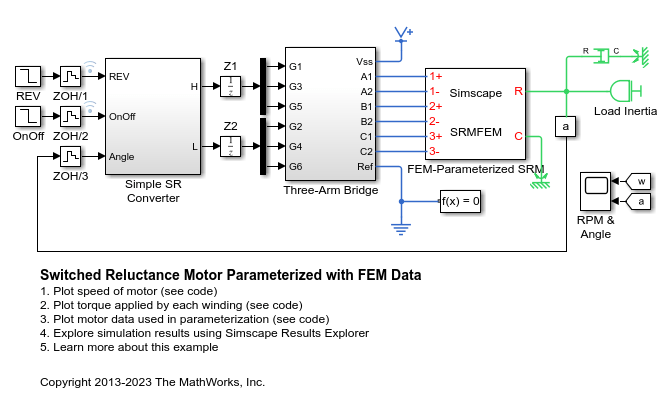
This example shows how to build a model of a Switched Reluctance Motor (SRM). A custom Simscape™ composite component is used to construct the three stator pole pairs using the Simscape Electrical™ FEM-Parameterized Rotary Actuator as a base component. The states of the input pins (reverse, on/off) control the torque applied to the motor shaft.
Model
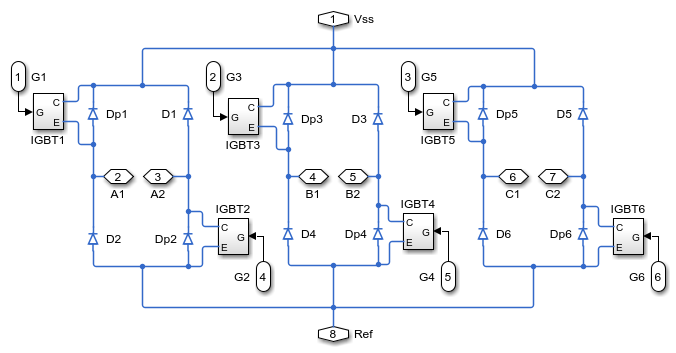
Three-Arm Bridge Subsystem
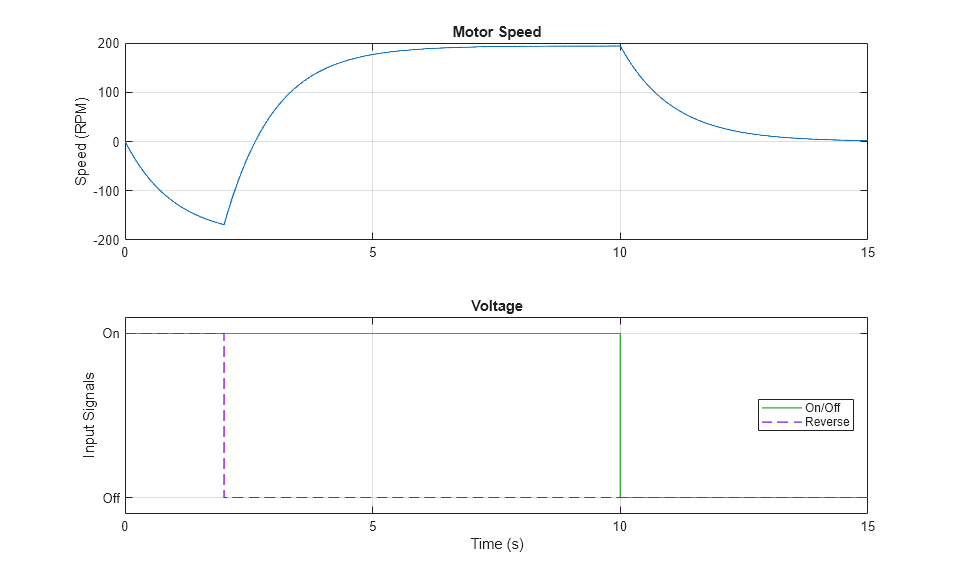
Simulation Results from Simscape Logging
The plot below shows the behavior of the motor as control signals at the input pins of the converter are varied. The sign of the torque the motor applies to its shaft is controlled by the reverse signal. If the On/Off signal is set to 0, the motor applies no torque to the motor shaft. In this test, after the On/Off signal is set to zero, the motor shaft slows down due to viscous friction applied to the shaft.
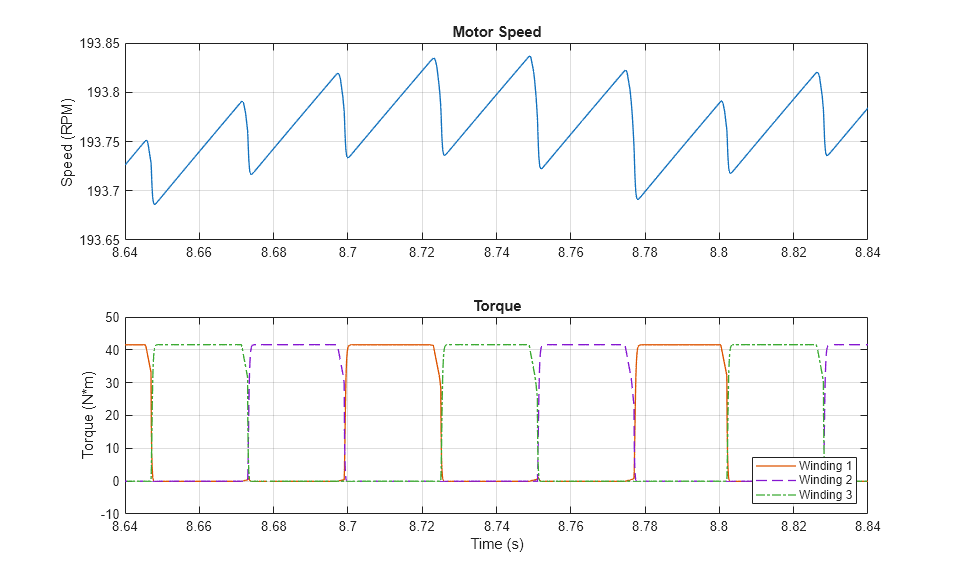
The plot below shows the behavior of the motor over a very short period of time so that the effect of the torque applied by each winding can be observed. A very small ripple in motor speed can be observed as the individual windings are energized and de-energized.
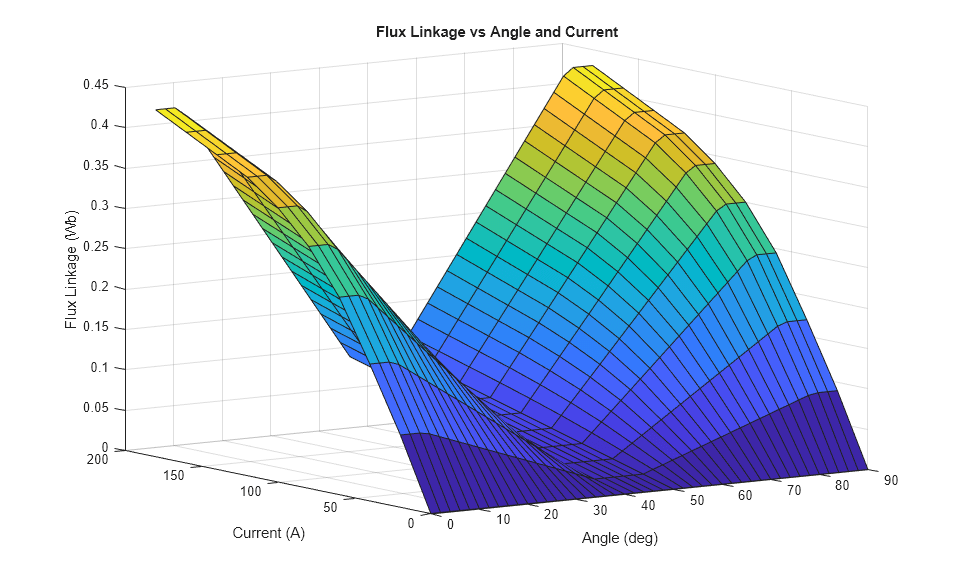
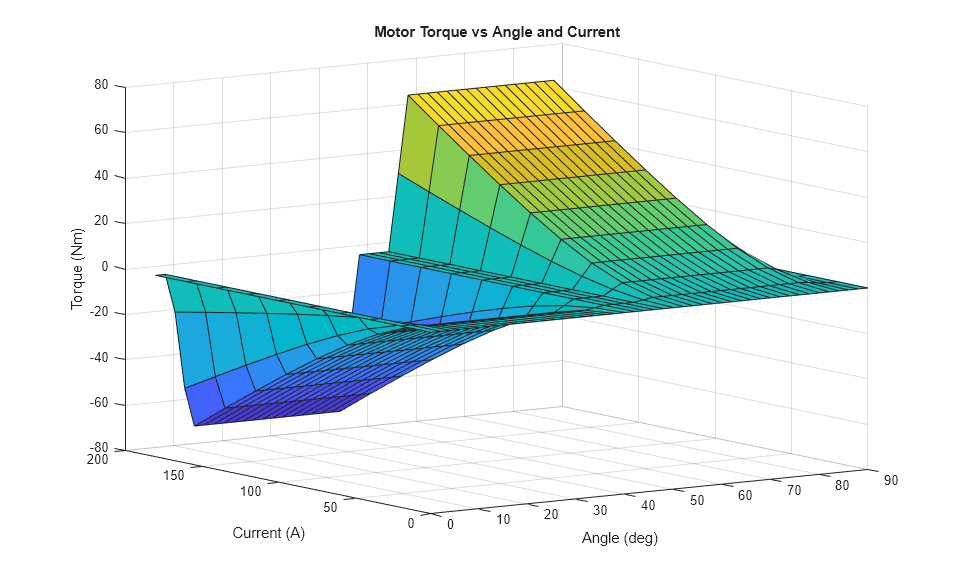
The plots below show the data used to parameterize the motor. Lookup tables for both flux linkage and motor torque dependent upon angle and current are plotted.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)