PX4 uORB Read
Read uORB data for the specified uORB topic
Add-On Required: This feature requires the UAV Toolbox Support Package for PX4 Autopilots add-on.

Libraries:
UAV Toolbox Support Package for PX4 Autopilots /
PX4 uORB Read and Write Blocks
Description
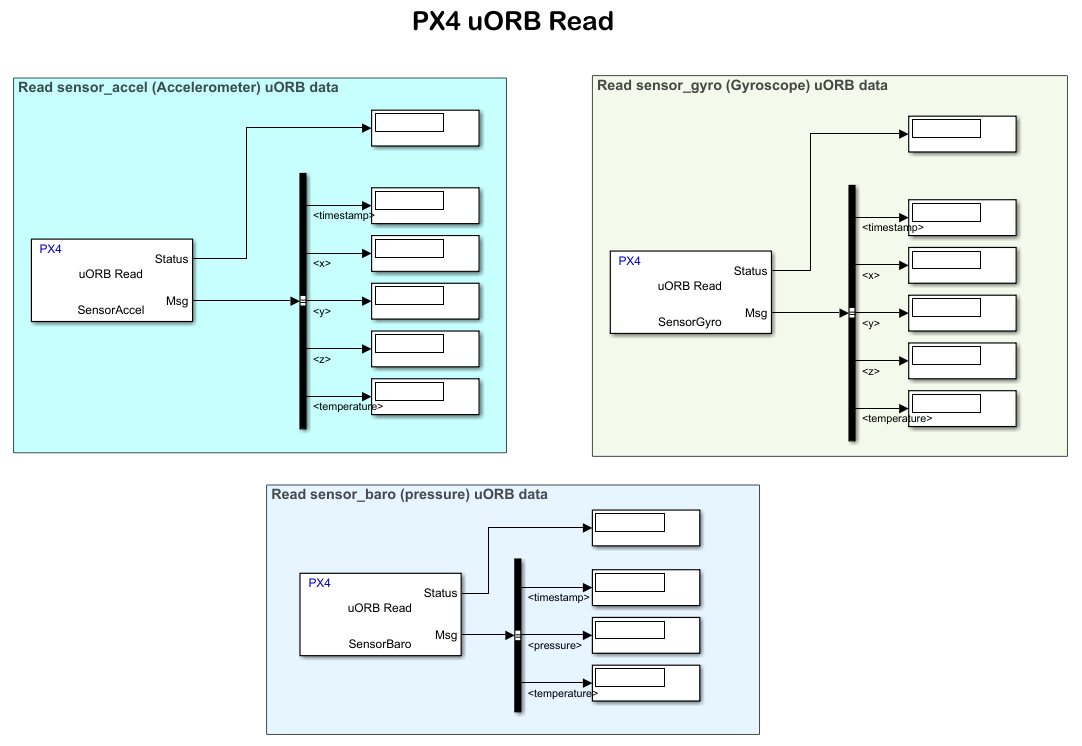
The PX4 uORB Read block creates a Simulink® nonvirtual bus that corresponds to the specified uORB topic.
On each simulation step, the block checks if a new message is available on the specific topic. If a new message is available, the block retrieves the message and converts it to a Simulink bus signal. The Msg port outputs this new message. If a new message is not available, Msg outputs the last received uORB message. If a message has not been received since the start of the simulation, Msg outputs a blank message.
During Normal mode simulation, the block outputs zeroes.
During Connected I/O simulation, this block reads data from the peripherals of the hardware.
Ports
Output
Parameters
Topic to subscribe to — Name of the uORB topic to which the block needs to subscribe
sensor_accel (default) | One of the uORB topic
Select the name of the uORB topic that the block needs to subscribe to read the uORB
data. Click Select to browse the topic names available in the
Firmware/msg folder of the px4 directory that
you downloaded.
Select instance — Instance of the uORB topic to which the block needs to subscribe
instance of the uORB topic
Select the instance of the uORB topic that the block needs to subscribe to read the uORB data.
Dependencies
This parameter appears only if you select a topic that supports multiple instances, in the Topic to subscribe to parameter.
For example, the actuator_controls topic supports multiple
instances and you can select one instance from the drop-down.

Sample time — Interval at which the block reads values
0.001 (default) | any non-negative value that is a multiple of 0.001 | -1
Enter the time interval at which the block reads values from the uORB network.
When you set this parameter to -1, Simulink determines the best sample time for the block based on the block context
within the model.
Wait until data received — Wait until requested data is available
off (default) | on
When you select this option, the read operation runs in Blocking Mode. The read operation is blocked while waiting for the requested data to be available. When waiting for the data, the Status port displays same values from the previous time step. When the data become available, the Data port outputs data bytes, and the Status port changes to
0.A task overrun occurs if the target hardware is still waiting for the data to be available when the next read operation is scheduled to begin.
To fix overruns, Increase the time step by using the Sample time parameter.
When you clear this option, the read operation runs in Non-Blocking Mode. In this mode, the block does not wait for the requested data to be available.
Timeout in seconds — Time to wait until the data is received
0.1 (default) | (0, 2^32/1000]
Specify the amount of time that the block waits for the data during each time step, if the Wait until data received parameter is selected. If timeout occurs, the read operation is aborted.
Dependencies
This parameter appears only when you select the Wait until data received parameter.
Version History
Introduced in R2018b
See Also
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)