Simulate Mobile Robot with System Composer Workflow
Along with other tools, System Composer™ can help you organize and link requirements, design and allocate architecture models, analyze the system, and implement the design in Simulink®.
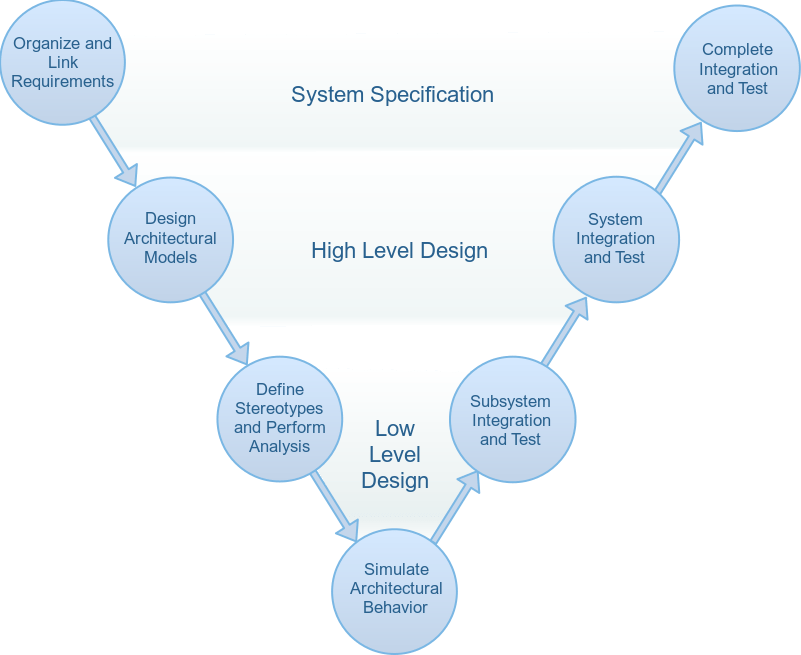
This tutorial shows the model-based systems engineering (MBSE) process for the early phases of development of an autonomous mobile robot, from specification and iterative design to simulation and verification. In Step 4, the robot navigates around a barrier in its path meeting the high-level functional requirements.
To explore these system design phases, follow the link to each step.
Create requirements and requirement links based on market research using Requirements Toolbox™. Link stakeholder requirements to system requirements. | |
Step 2 Design Architectures and Activity Diagram for Mobile Robot | Create architecture models to help organize algorithms and hardware. Use an activity diagram to elaborate on the functional flow behavior of the robot. Link requirements to components in the architecture models, then allocate element-to-element from the activity diagram to the logical architecture and from one architecture to another. |
Step 3 Define Stereotypes and Perform Analysis for Mobile Robot | Define stereotypes and perform system analysis to ensure that the life expectancy of the durable components in the robot meets the customer-specified mean time before repair. Use stereotype-based filters to create architecture views. Export your physical architecture to a web view. |
Create a Simulink model to simulate realistic behavior of the mobile robot. Add behaviors to components in your logical architecture model. Then, simulate the logical architecture using Simscape™ Multibody™. |
This workflow is represented by the left side of the model-based systems engineering (MBSE) design diagram.
To get started, open the project for this example.
openProject("scMobileRobotExample");References
[1] Rahman, Mohd Azizi Abdul, Katsuhiro Mayama, Takahiro Takasu, Akira Yasuda, and Makoto Mizukawa. “Model-Driven Development of Intelligent Mobile Robot Using Systems Modeling Language (SysML).” In Mobile Robots: Control Architectures, Bio-Interfacing, Navigation, Multi Robot Motion Planning and Operator Training, edited by Janusz Będkowski. InTech Open, 2011. https://doi.org/10.5772/26906.