Stereo Vision
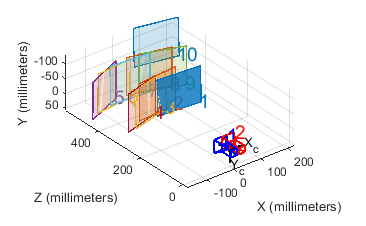
Stereo vision is the process of recovering depth from camera images by comparing two or more views of the same scene. The output of this computation is a 3-D point cloud, where each 3-D point corresponds to a pixel in one of the images.
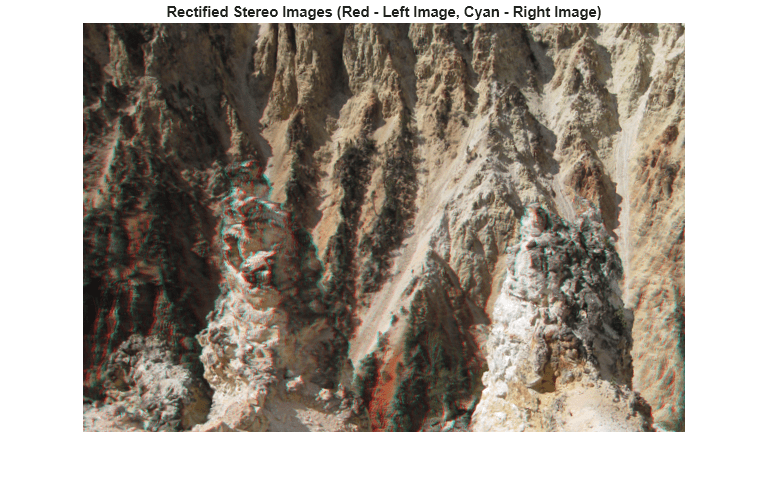
Stereo image rectification projects images onto a common image plane in such a way that the corresponding points have the same row coordinates. This process is useful for stereo vision, because the 2-D stereo correspondence problem reduces to a 1-D problem. As an example, stereo image rectification is often used as a preprocessing step for computing disparity or creating anaglyph images.
Apps
| Camera Calibrator | Estimate geometric parameters of a single camera |
| Stereo Camera Calibrator | Estimate geometric parameters of a stereo camera |
Functions
Topics
- Coordinate Systems
Specify pixel Indices, spatial coordinates, and 3-D coordinate systems.
- Using the Stereo Camera Calibrator App
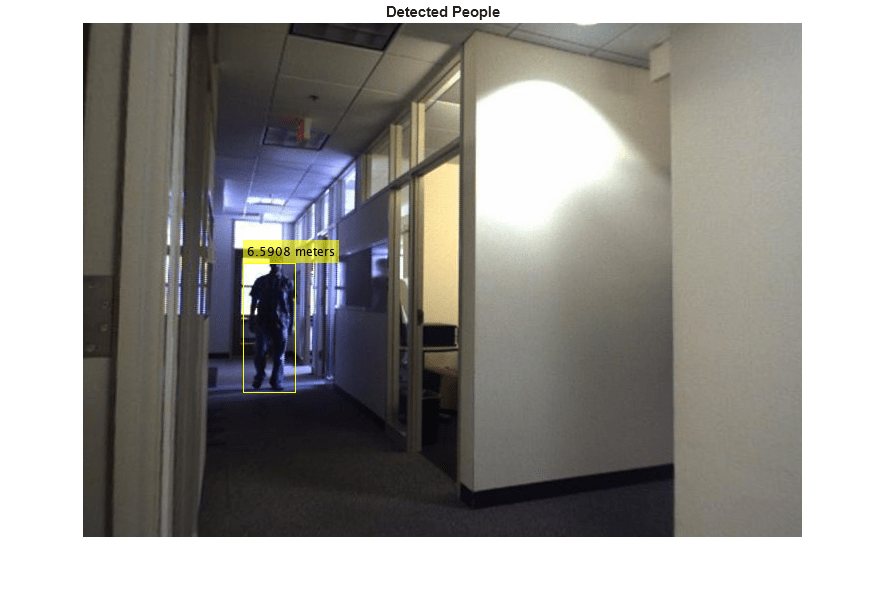
Calibrate a stereo camera, which you can then use to recover depth from images.
Featured Examples
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)