Depth Estimation from Stereo Video
This example shows how to detect people and their distance to the camera from a video taken with a calibrated stereo camera.
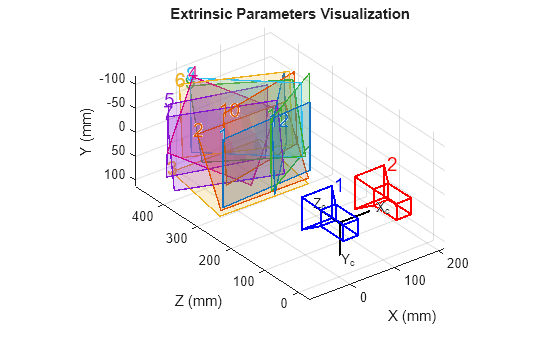
Load the Parameters of the Stereo Camera
Load the stereoParameters object, which is the result of calibrating the camera using either the stereoCameraCalibrator app or the estimateCameraParameters function.
% Load the stereoParameters object. load("handshakeStereoParams.mat"); % Visualize camera extrinsics. showExtrinsics(stereoParams);
Create Video File Readers and the Video Player
Create System objects for reading and displaying the video.
videoFileLeft = "handshake_left.avi"; videoFileRight = "handshake_right.avi"; readerLeft = VideoReader(videoFileLeft); readerRight = VideoReader(videoFileRight); player = vision.VideoPlayer(Position=[20,200,740 560]);
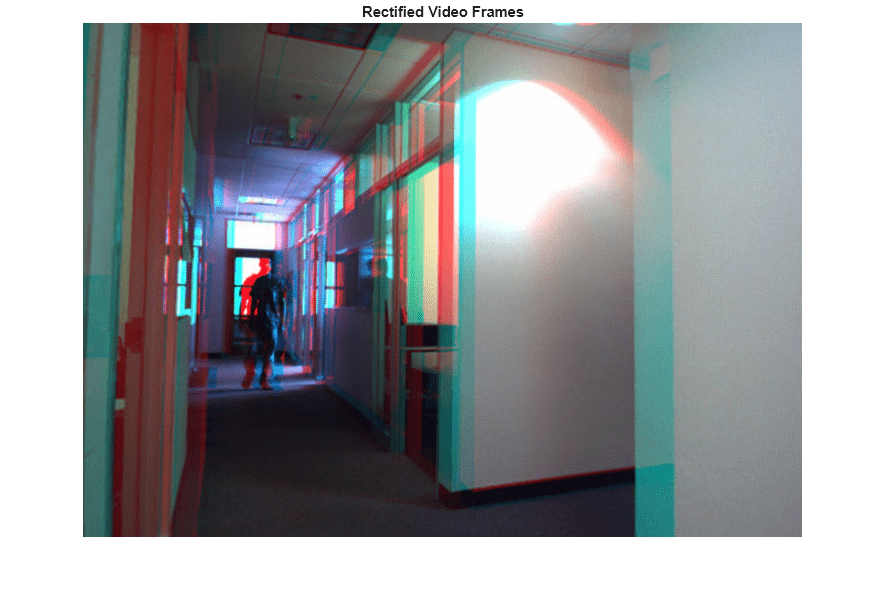
Read and Rectify Video Frames
The frames from the left and the right cameras must be rectified in order to compute disparity and reconstruct the 3-D scene. Rectified images have horizontal epipolar lines, and are row-aligned. This simplifies the computation of disparity by reducing the search space for matching points to one dimension. Rectified images can also be combined into an anaglyph, which can be viewed using the stereo red-cyan glasses to see the 3-D effect.
frameLeft = readFrame(readerLeft); frameRight = readFrame(readerRight); [frameLeftRect, frameRightRect, reprojectionMatrix] = ... rectifyStereoImages(frameLeft, frameRight, stereoParams); figure; imshow(stereoAnaglyph(frameLeftRect, frameRightRect)); title("Rectified Video Frames");
Compute Disparity
In rectified stereo images any pair of corresponding points are located on the same pixel row. For each pixel in the left image compute the distance to the corresponding pixel in the right image. This distance is called the disparity, and it is proportional to the distance of the corresponding world point from the camera.
frameLeftGray = im2gray(frameLeftRect);
frameRightGray = im2gray(frameRightRect);
disparityMap = disparitySGM(frameLeftGray, frameRightGray);
figure;
imshow(disparityMap, [0, 64]);
title("Disparity Map");
colormap jet
colorbar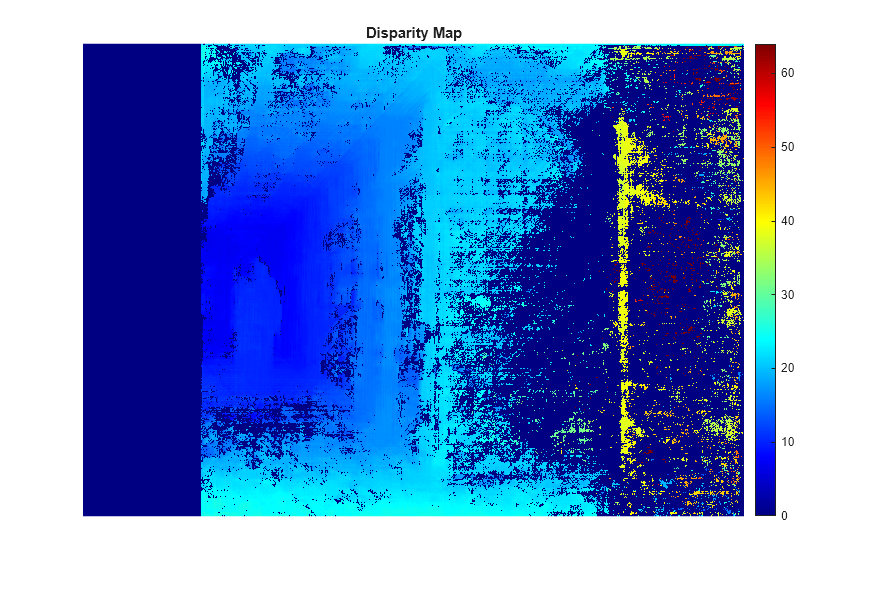
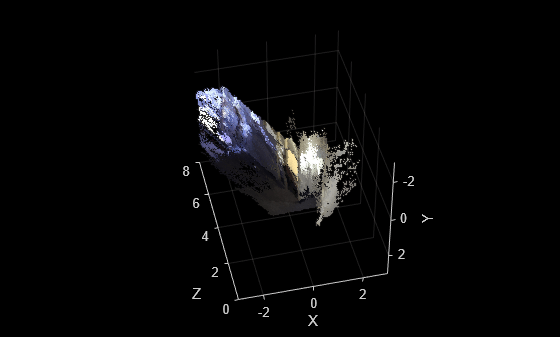
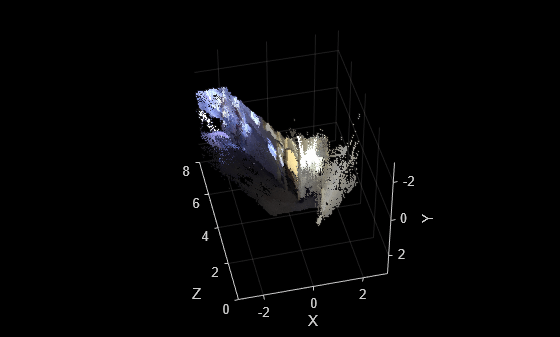
Reconstruct the 3-D Scene
Reconstruct the 3-D world coordinates of points corresponding to each pixel from the disparity map.
points3D = reconstructScene(disparityMap, reprojectionMatrix); % Convert to meters and create a pointCloud object points3D = points3D ./ 1000; ptCloud = pointCloud(points3D, Color=frameLeftRect); % Create a streaming point cloud viewer player3D = pcplayer([-3, 3], [-3, 3], [0, 8], VerticalAxis="y", ... VerticalAxisDir="down"); % Visualize the point cloud view(player3D, ptCloud);
Detect People in the Left Image
Load a pretrained people detector and detect people in the left camera frame.
peopleDetector = peopleDetectorACF(); bboxes = detect(peopleDetector,frameLeftGray);
Determine the Distance of Each Person to the Camera
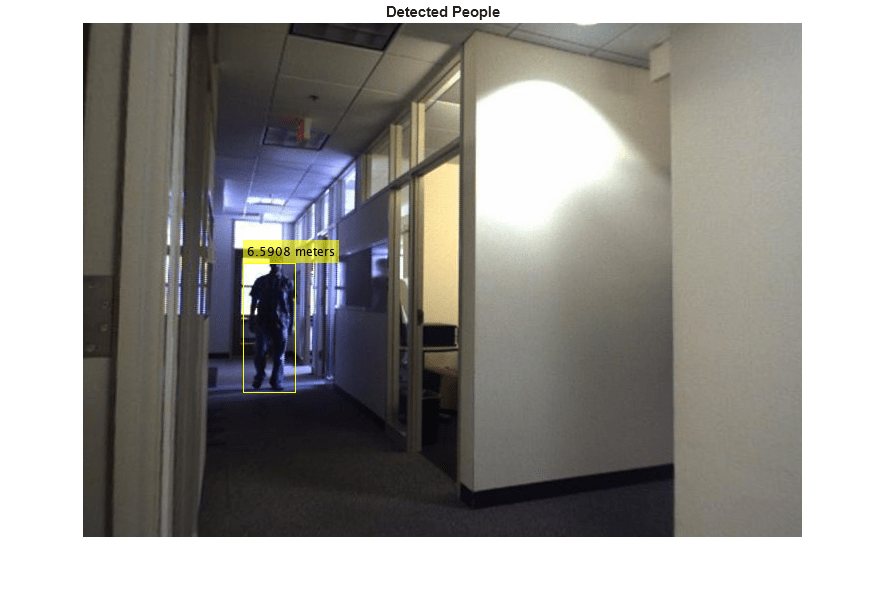
Find the 3-D world coordinates of the centroid of each detected person and compute the distance from the centroid to the camera in meters.
% Find the centroids of detected people. centroids = [round(bboxes(:, 1) + bboxes(:, 3) / 2), ... round(bboxes(:, 2) + bboxes(:, 4) / 2)]; % Find the 3-D world coordinates of the centroids. centroidsIdx = sub2ind(size(disparityMap), centroids(:, 2), centroids(:, 1)); X = points3D(:, :, 1); Y = points3D(:, :, 2); Z = points3D(:, :, 3); centroids3D = [X(centroidsIdx)'; Y(centroidsIdx)'; Z(centroidsIdx)']; % Find the distances from the camera in meters. dists = sqrt(sum(centroids3D .^ 2)); % Display the detected people and their distances. labels = dists+" meters"; figure imshow(insertObjectAnnotation(frameLeftRect, "rectangle", bboxes, labels)); title("Detected People");
Process the Rest of the Video
Apply the steps described above to detect people and measure their distances to the camera in every frame of the video.
while hasFrame(readerLeft) && hasFrame(readerRight) % Read the frames. frameLeft = readFrame(readerLeft); frameRight = readFrame(readerRight); % Rectify the frames. [frameLeftRect, frameRightRect] = ... rectifyStereoImages(frameLeft, frameRight, stereoParams); % Convert to grayscale. frameLeftGray = im2gray(frameLeftRect); frameRightGray = im2gray(frameRightRect); % Compute disparity. disparityMap = disparitySGM(frameLeftGray, frameRightGray); % Reconstruct 3-D scene. points3D = reconstructScene(disparityMap, reprojectionMatrix); points3D = points3D ./ 1000; ptCloud = pointCloud(points3D, Color=frameLeftRect); view(player3D, ptCloud); % Detect people. bboxes = detect(peopleDetector,frameLeftGray); if ~isempty(bboxes) % Find the centroids of detected people. centroids = [round(bboxes(:, 1) + bboxes(:, 3) / 2), ... round(bboxes(:, 2) + bboxes(:, 4) / 2)]; % Find the 3-D world coordinates of the centroids. centroidsIdx = sub2ind(size(disparityMap), centroids(:, 2), centroids(:, 1)); X = points3D(:, :, 1); Y = points3D(:, :, 2); Z = points3D(:, :, 3); centroids3D = [X(centroidsIdx), Y(centroidsIdx), Z(centroidsIdx)]; % Find the distances from the camera in meters. dists = sqrt(sum(centroids3D .^ 2, 2)); % Display the detect people and their distances. labels = dists+" meters"; dispFrame = insertObjectAnnotation(frameLeftRect, "rectangle", bboxes,... labels); else dispFrame = frameLeftRect; end % Display the frame. step(player, dispFrame); end
% Clean up
release(player);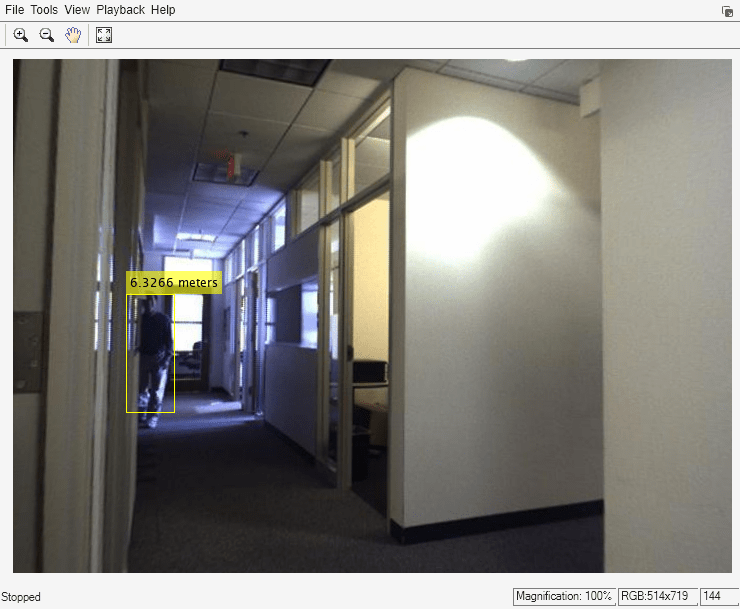
Summary
This example showed how to localize pedestrians in 3-D using a calibrated stereo camera.
References
[1] G. Bradski and A. Kaehler, "Learning OpenCV : Computer Vision with the OpenCV Library," O'Reilly, Sebastopol, CA, 2008.
[2] Dalal, N. and Triggs, B., Histograms of Oriented Gradients for Human Detection. CVPR 2005.