Overview
Navigating a self-driving car or a warehouse robot autonomously involves a range of subsystems such as perception, motion planning, and controls. MATLAB® and Simulink® provides algorithms and tools for robotics and autonomous systems to design, simulate, test and deploy motion planning, navigation, and multi-object tracking workflows. In this webinar, you will learn how to design and develop an end-to-end workflow for an autonomous navigation system.
Highlights
Through several examples, we will cover:
- Perception algorithm design
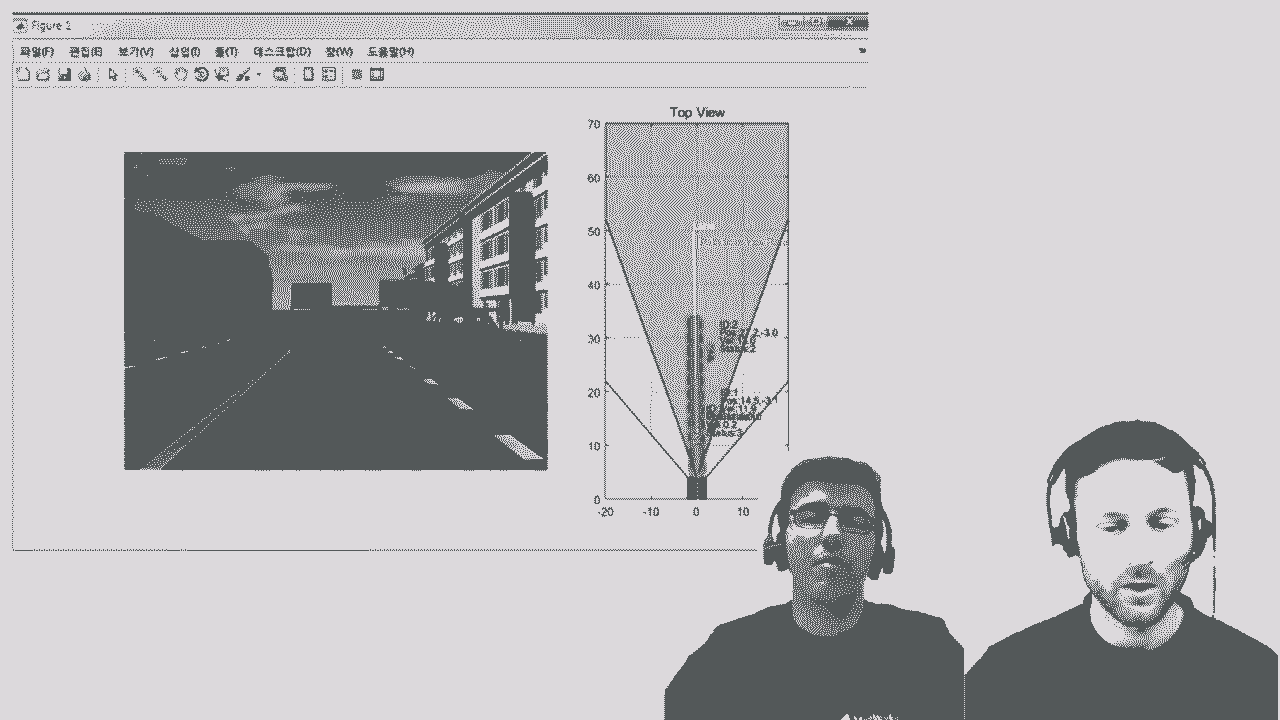
- Fusion of sensor data (camera, Lidar, and radar) to maintain situational awareness
- Mapping the environment and localizing the vehicle
- Path planning with obstacle avoidance
- Path following and control design
- Interfacing to ROS networks and generating standalone ROS nodes for deployment
About the Presenter
Mihir Acharya supports the Robotics and Autonomous Systems applications at MathWorks, focusing on Autonomous Navigation. Prior to MathWorks, Mihir has worked with ABB Corporate Research, where he designed and developed mechatronics systems such as end effectors for robot manipulation. Mihir also worked with Omron Adept Technologies for a year, conducting research on various path planning algorithms and their efficiency on a mobile robot platform. Mihir holds an MS in Robotics Engineering from Worcester Polytechnic Institute (WPI). While at WPI, Mihir’s focus of study was mobile robotics and he also worked as the lab assistant of the Music, Perception, and Robotics Lab (mprlab) where he designed state-of-the-art musical robots (interactive platforms to generate music).
macharya@mathworks.com
Rick Gentile focuses on Phased Array, Signal Processing, and Sensor Fusion applications at MathWorks. Prior to joining MathWorks, Rick was a Radar Systems Engineer at MITRE and MIT Lincoln Laboratory, where he worked on the development of radar systems. Rick also was a DSP Applications Engineer at Analog Devices where he led embedded processor and system level architecture definitions for high performance signal processing systems, including automotive driver assist systems. Rick co-authored the text “Embedded Media Processing”. He received a B.S. in Electrical and Computer Engineering from the University of Massachusetts, Amherst and an M.S. in Electrical and Computer Engineering from Northeastern University, where his focus areas of study included Microwave Engineering, Communications and Signal Processing.
rgentile@mathworks.com
YJ Lim is a Sr. Technical Product Manager for robotics at the MathWorks. YJ has over 20 years of experience in the areas of robotics and autonomous systems. YJ's responsibility in MathWorks includes product management and long-term strategy development of robotics and autonomous systems areas. Before joining MathWorks, YJ worked for Vecna Robotics in Waltham, MA, leading a team working on Vecna’s advanced robotic system. Prior to Vecna, YJ served as the Chief Innovation Officer at Hstar Technologies, a firm focused on agile mobile robotic platform and healthcare service robotics system. He worked with government agencies and served on governmental working groups on matters of advanced robotics system research. Before that, YJ led development teams at Energid Technologies, a firm that provides engineering services and products for advanced robotic, machine-vision, and simulation applications, for robotic software development. His first job started in automotive industry, Daewoo Motors, S. Korea, for advanced platform research. YJ received his Ph.D. in mechanical engineering from Rensselaer Polytechnic Institute (RPI) and his Master from KAIST in S. Korea.
yjlim@mathworks.com