LTI System
Use linear time invariant system model object in Simulink
Libraries:
Control System Toolbox
Description
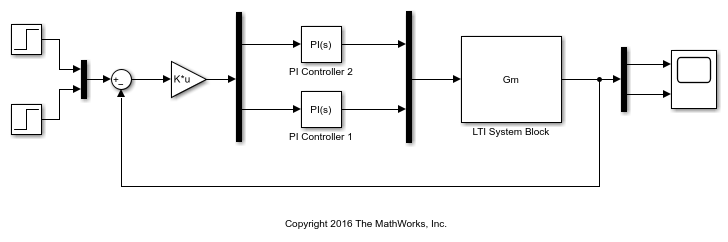
The LTI System block imports linear system model objects into the
Simulink® environment. You specify the LTI model to import in the LTI
system variable parameter. You can import any type of proper linear
time-invariant dynamic system model. If the imported system is a state-space (ss) model, you can specify initial state values in the Initial
states parameter.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced before R2006aYou can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)