imfindcircles
Find circles using circular Hough transform
Syntax
Description
[
finds circles with radii in the range specified by centers,radii]
= imfindcircles(A,radiusRange)radiusRange. The
additional output argument, radii, contains the estimated radii
corresponding to each circle center in centers.
[
also returns a column vector, centers,radii,metric]
= imfindcircles(A,radiusRange)metric, containing the magnitudes of the
accumulator array peaks for each circle (in descending order). The rows of
centers and radii correspond to the rows of
metric.
[___]
= imfindcircles(___, specifies
additional options with one or more name-value arguments, using any of the previous
syntaxes.Name=Value)
Examples
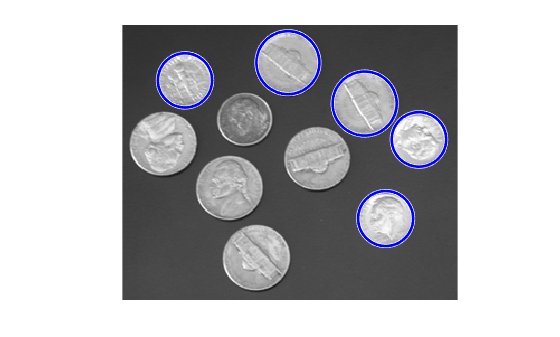
This example shows how to find all circles in an image, and how to retain and display the strongest circles.
Read a grayscale image into the workspace and display it.
A = imread('coins.png');
imshow(A)
Find all the circles with radius r pixels in the range [15, 30].
[centers, radii, metric] = imfindcircles(A,[15 30]);
Retain the five strongest circles according to the metric values.
centersStrong5 = centers(1:5,:); radiiStrong5 = radii(1:5); metricStrong5 = metric(1:5);
Draw the five strongest circle perimeters over the original image.
viscircles(centersStrong5, radiiStrong5,'EdgeColor','b');
Read the image into the workspace and display it.
A = imread('circlesBrightDark.png');
imshow(A)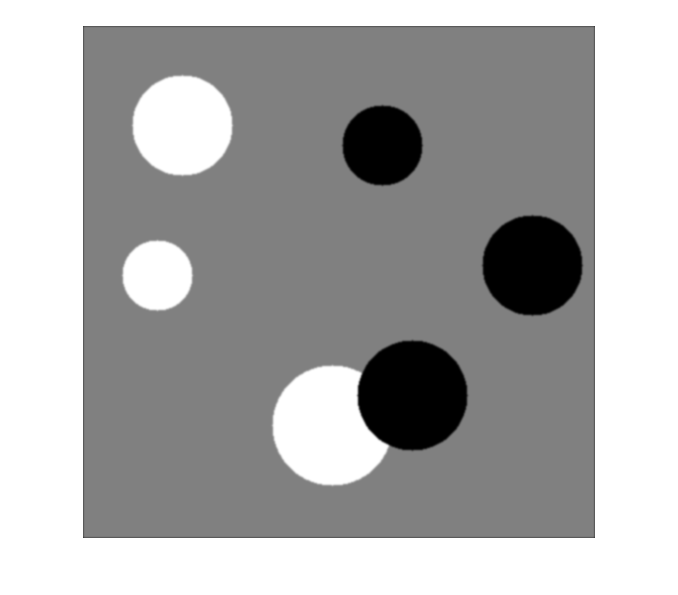
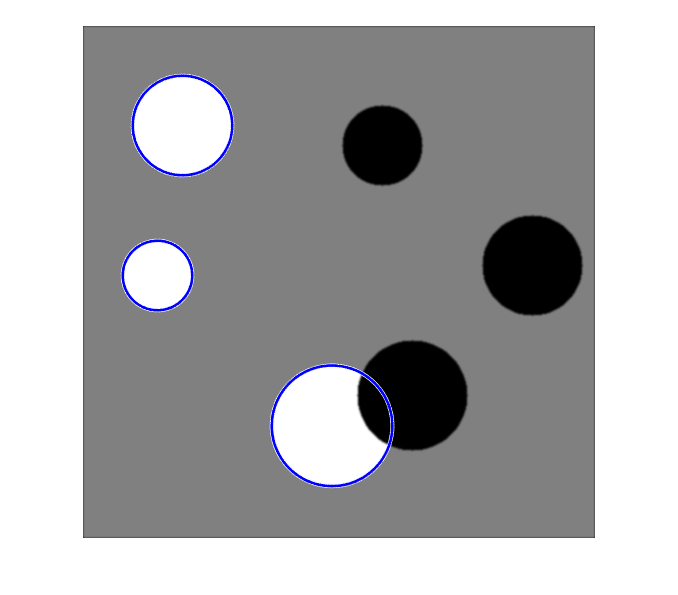
Define the radius range.
Rmin = 30; Rmax = 65;
Find all the bright circles in the image within the radius range.
[centersBright, radiiBright] = imfindcircles(A,[Rmin Rmax],'ObjectPolarity','bright');
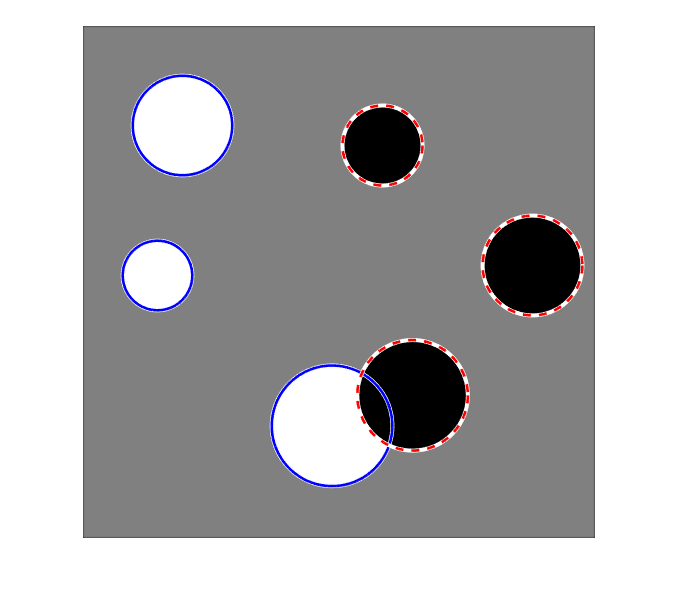
Find all the dark circles in the image within the radius range.
[centersDark, radiiDark] = imfindcircles(A,[Rmin Rmax],'ObjectPolarity','dark');
Draw blue lines around the edges of the bright circles.
viscircles(centersBright, radiiBright,'Color','b');
Draw red dashed lines around the edges of the dark circles.
viscircles(centersDark, radiiDark,'LineStyle','--');
Input Arguments
Name-Value Arguments
Output Arguments
Tips
The accuracy of
imfindcirclesis limited when the value ofradius(orrmin) is less than or equal to 5.The radius estimation step is typically faster if you use the (default)
"PhaseCode"method instead of"TwoStage".Both computation methods,
"PhaseCode"and"TwoStage"are limited in their ability to detect concentric circles. The results for concentric circles can vary depending on the input image.imfindcirclesdoes not find circles with centers outside the domain of the image.imfindcirclesconverts truecolor images to grayscale using the functionrgb2graybefore processing them. Binary (logical) and integer type images are converted to the data typesingleusing theim2singlefunction before processing. To improve the accuracy of the result for binary images,imfindcirclesalso applies Gaussian smoothing usingimfilteras a preprocessing step.
Algorithms
imfindcircles uses a Circular Hough Transform (CHT) based algorithm
for finding circles in images. This approach is used because of its robustness in the presence
of noise, occlusion and varying illumination.
The CHT is not a rigorously specified algorithm, rather there are a number of different approaches that can be taken in its implementation. However, there are three important steps which are common to all approaches.
Accumulator Array Computation
Foreground pixels of high gradient are designated as being candidate pixels and are allowed to cast ‘votes’ in the accumulator array. In a classical CHT implementation, the candidate pixels vote in pattern around them that forms a full circle of a fixed radius. Figure 1a shows an example of a candidate pixel lying on an actual circle (solid circle) and the classical CHT voting pattern (dashed circles) for the candidate pixel.
Classical CHT Voting Pattern
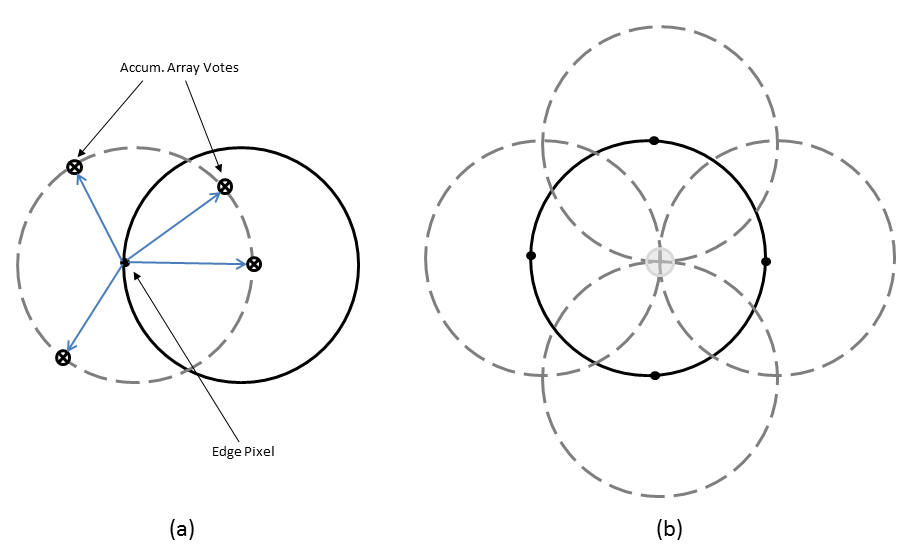
Center Estimation
The votes of candidate pixels belonging to an image circle tend to accumulate at the accumulator array bin corresponding to the circle’s center. Therefore, the circle centers are estimated by detecting the peaks in the accumulator array. Figure 1b shows an example of the candidate pixels (solid dots) lying on an actual circle (solid circle), and their voting patterns (dashed circles) which coincide at the center of the actual circle.
Radius Estimation
If the same accumulator array is used for more than one radius value, as is commonly done in CHT algorithms, radii of the detected circles have to be estimated as a separate step.
imfindcircles provides two algorithms for finding circles in images:
phase-coding (default) and two-stage. Both share some common computational steps, but each has
its own unique aspects as well.
The common computational features shared by both algorithms are as follows:
Use of 2-D Accumulator Array
The classical Hough Transform requires a 3-D array for storing votes for multiple radii, which results in large storage requirements and long processing times. Both the phase-coding and two-stage methods solve this problem by using a single 2-D accumulator array for all the radii. Although this approach requires an additional step of radius estimation, the overall computational load is typically lower, especially when working over a large radius range. This is a widely adopted practice in modern CHT implementations.
Use of Edge Pixels
Overall memory requirements and speed are strongly governed by the number of candidate pixels. To limit their number, the gradient magnitude of the input image is thresholded so that only pixels of high gradient are included in tallying votes.
Use of Edge Orientation Information
Performance is also optimized by restricting the number of bins available to candidate pixels. This is accomplished by using locally available edge information to only permit voting in a limited interval along direction of the gradient (Figure 2). The width of the voting interval, between points cmin and cmax in the figure, is determined by the radius range defined by rmin and rmax.
Voting Mode: Multiple Radii, Along Direction of Gradient
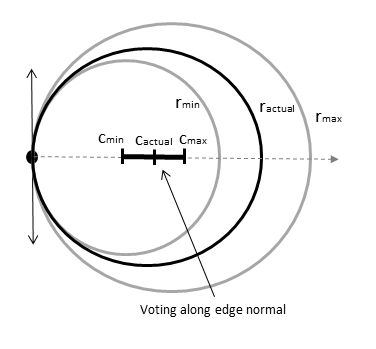
| rmin | Minimum search radius |
| rmax | Maximum search radius |
| ractual | Radius of the circle that the candidate pixel belongs to |
| cmin | Center of the circle of radius rmin |
| cmax | Center of the circle of radius rmax |
| cactual | Center of the circle of radius ractual |
The two CHT methods employed by the function imfindcircles
fundamentally differ in the manner by which the circle radii are computed.
Two-Stage
Radii are explicitly estimated using the estimated circle centers along with image information. The technique is based on computing radial histograms [2] [3].
Phase-Coding
Radii are estimated from complex values in the accumulator array, with the radius information encoded in the phase of the array entries [1]. The votes cast by the edge pixels contain information not only about the possible center locations but also about the radius of the circle associated with the center location. Unlike the two-stage method where the radius has to be estimated explicitly using radial histograms, in phase-coding the radius can be estimated by simply decoding the phase information from the estimated center location in the accumulator array.
References
[1] T.J Atherton, D.J. Kerbyson. "Size invariant circle detection." Image and Vision Computing. Volume 17, Number 11, 1999, pp. 795-803.
[2] H.K Yuen, J. Princen, J. Illingworth, and J. Kittler. "Comparative study of Hough transform methods for circle finding." Image and Vision Computing. Volume 8, Number 1, 1990, pp. 71–77.
[3] E.R. Davies, Machine Vision: Theory, Algorithms, Practicalities. Chapter 10. 3rd Edition. Morgan Kauffman Publishers, 2005.
Extended Capabilities
Version History
Introduced in R2012aSee Also
circles2mask | hough | houghpeaks | houghlines | viscircles | imfindcirclesYOLO