yulewalk
Recursive digital filter design
Syntax
Description
Examples
Yule-Walker Design of Lowpass Filter
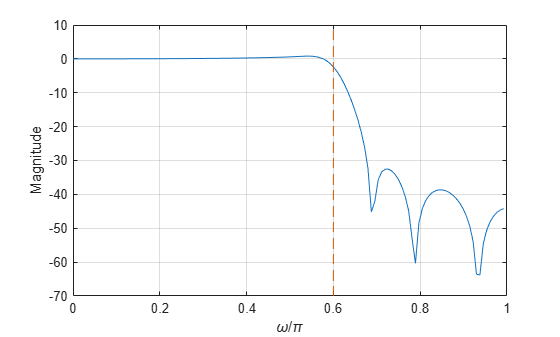
Design an 8th-order lowpass filter with normalized cutoff frequency 0.6. Plot its frequency response and overlay the response of the corresponding ideal filter.
f = [0 0.6 0.6 1]; m = [1 1 0 0]; [b,a] = yulewalk(8,f,m); [h,w] = freqz(b,a,128); plot(w/pi,mag2db(abs(h))) yl = ylim; hold on plot(f(2:3),yl,'--') xlabel('\omega/\pi') ylabel('Magnitude') grid
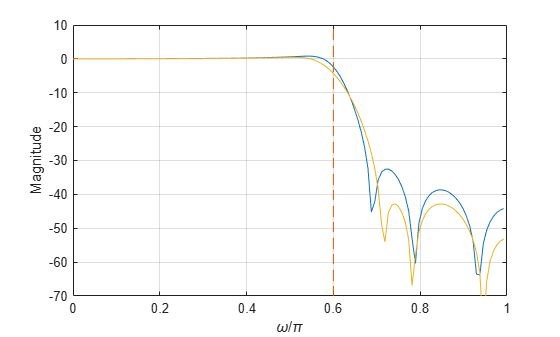
Increase the stopband attenuation by specifying a wider transition band.
f = [0 0.55 0.6 0.65 1]; m = [1 1 0.5 0 0]; [b,a] = yulewalk(8,f,m); h = freqz(b,a,128); hold on plot(w/pi,mag2db(abs(h))) hold off ylim(yl)
Input Arguments
Output Arguments
Tips
When specifying the frequency response, avoid excessively sharp transitions from passband to stopband. You may need to experiment with the slope of the transition region to get the best filter design.
Algorithms
yulewalk designs recursive IIR digital filters using a least-squares
fit to a specified frequency response. The function performs the fit in the time domain.
To compute the denominator coefficients,
yulewalkuses modified Yule-Walker equations, with correlation coefficients computed by inverse Fourier transformation of the specified frequency response.To compute the numerator,
yulewalkfollows these steps:Compute a numerator polynomial corresponding to an additive decomposition of the power frequency response.
Evaluate the complete frequency response corresponding to the numerator and denominator polynomials.
Use a spectral factorization technique to obtain the impulse response of the filter.
Obtain the numerator polynomial by a least-squares fit to this impulse response.
References
[1] Friedlander, B., and Boaz Porat. "The Modified Yule-Walker Method of ARMA Spectral Estimation." IEEE® Transactions on Aerospace Electronic Systems. Vol. AES-20, Number 2, 1984, pp. 158–173.
Extended Capabilities
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)