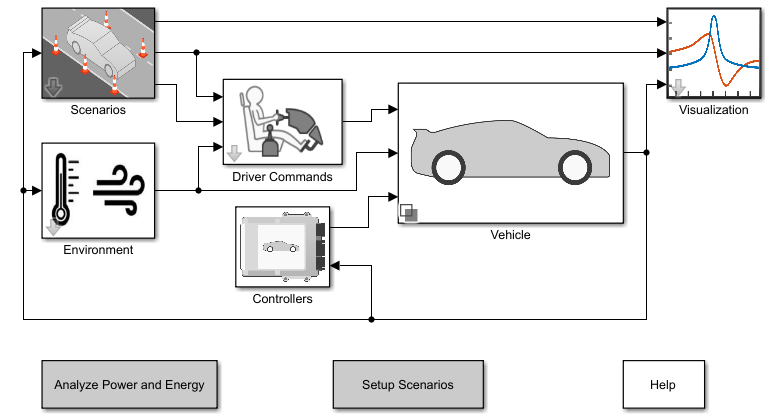
Deploy Virtual Vehicle Composer Model to Speedgoat Real-Time Target Machine
Configure a copy of the Conventional Vehicle Reference Application to use Simulink® Real-Time™ and deploy the model to a Speedgoat® real-time target machine.
For Simscape™-configured vehicle models generated using the Virtual Vehicle Composer app, the provided workflow has been validated only for models with longitudinal only vehicle dynamics.
Build Conventional Vehicle Model
Create and open a working copy of the Conventional Vehicle Reference Application project.
autoblkConVehStart();
Extract the top-level name of the model.
modelName=bdroot;
Set System Target Files
The Virtual Vehicle Composer model uses configuration sets stored in data dictionaries. These configuration sets use the default system target file grt.tlc. Programmatically change the system target files in the configuration sets to use the Speedgoat compatible target file speedgoat.tlc.
Open the data dictionaries that contain the configuration sets.
dd1 = Simulink.data.dictionary.open('VehicleConfig.sldd'); cs1 = dd1.getSection('Configurations'); dd2 = Simulink.data.dictionary.open('VirtualDynoConfig.sldd'); cs2 = dd2.getSection('Configurations');
From the list of target files, select the Speedgoat system target file speedgoat.tlc.
Note that you must have Speedgoat I/O Blockset installed to access the speedgoat.tlc file.
To install your Speedgoat I/O Blockset, see Speedgoat - Real-Time Simulation and Testing. Follow the instructions to download and install the Speedgoat I/O Blockset.
newSystemTargetFile =  'slrealtime.tlc';
'slrealtime.tlc';Get all the configuration set entries in the section and iterate over each configuration set to change the system target file.
entries1 = find(cs1); entries2 = find(cs2); allEntries = [entries1; entries2]; for i = 1:numel(allEntries) % Get the name of the Configuration Set configSetName = allEntries(i).Name; % Load the Configuration Set object configSetObj = getValue(allEntries(i)); % Change the system target file of the Configuration Set set_param(configSetObj, 'SystemTargetFile', newSystemTargetFile); % Save the modified Configuration Set back to the data dictionary setValue(allEntries(i), configSetObj); end
Save the changes in the data dictionaries and close the data dictionaries.
saveChanges(dd1); saveChanges(dd2); close(dd1); close(dd2);
Update Code Mapping for Vehicle Models with a Battery Management System (BMS)
Update the model Code Mapping settings for code generation in the top model and all model references for vehicle models configured with a BMS. Note that for vehicles configured without a BMS, these settings are updated automatically.
modelRefs = find_mdlrefs( ... modelName, 'MatchFilter', @Simulink.match.allVariants); for i = 1:length(modelRefs) load_system(modelRefs{i}); codeMapping = coder.mapping.api.CodeMapping( ... modelRefs{i}, 'SimulinkCoderC'); codeMapping.setDataDefault( ... 'ExternalParameters', ... 'StorageClass', ... 'PageSwitching (slrealtime)'); codeMapping.setDataDefault( ... 'ModelParameters', 'StorageClass', 'PageSwitching'); save_system(modelRefs{i}); end
Change Global Solver Settings
To generate code and deploy the model to the Speedgoat target, the top-level solver must be set to a fixed-step solver.
activeConfig = getActiveConfigSet(modelName);
activeConfig.SourceName = 'VehicleFixed1ms';If you configure a Simscape vehicle model with longitudinal dynamics, turn on the local solver, set the local sample time to 1 ms, and use fixed-cost runtime consistency iterations.
variantCheck = get_param([modelName '/Vehicle'], 'VariantChoices'); isActive = strcmp(variantCheck.Name, 'ConfiguredSimscapePlantModel'); if isActive SimscapeBlockPath = [modelName '/Vehicle/ConfiguredSimscapePlantModel/Solver Configuration/Solver Configuration']; set_param(SimscapeBlockPath, 'UseLocalSolver', 'on', ... 'LocalSolverSampleTime', '0.001', ... 'DoFixedCost', 'on'); end
Connect to Target Machine
You must configure a link between the development computer and the Speedgoat target machine. For more information, see Set Up and Configure Simulink Real-Time (Simulink Real-Time).
After the link is configured, to run the commands to connect the development computer and target machine, select the checkbox.
iffalse tg = slrealtime; tg.connect; end
Run Model on Target Machine
When you are ready to build the application, deploy the model to the target, and run the simulation in external mode, select the checkbox.
iffalse slbuild(modelName); load(tg, modelName); set_param(modelName, 'SimulationMode', 'external'); set_param(modelName, 'SimulationCommand', 'Connect'); set_param(modelName, 'SimulationCommand', 'start'); end
Alternatively, build, deploy, and run the model on the target machine from the Simulink Real-Time tab. First, enable this tab by navigating to the Apps tab and searching for Simulink Real-Time. Next, open the app and select the Speedgoat real-time target machine from the Speedgoat Target Platform Selector. Then, click Run on Target.

Alternatively, to execute each step individually, click the Run on Target arrow button and follow the order of the buttons displayed.

For more information, see Execute Real-Time Application in Simulink External Mode by Using Step-by-Step Commands (Simulink Real-Time).
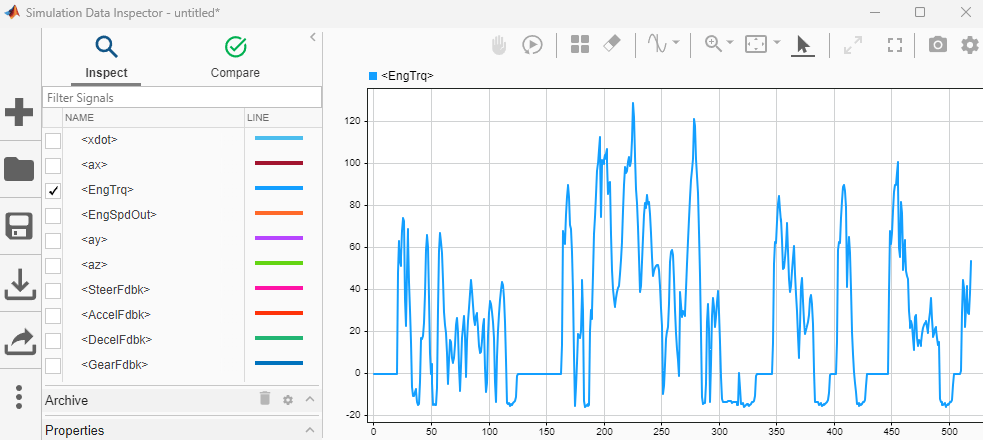
View Simulation Output in Real-Time
For this example, the virtual vehicle model simulates the FTP75 drive cycle.
To open the Simulink Data Inspector, select the checkbox.
iffalse Simulink.sdi.view; end
Select output signals to view the simulation results in real-time.
See Also
Speedgoat Target Computer Support (Simulink Real-Time) | Set Up and Configure Simulink Real-Time (Simulink Real-Time)