getSectorCrossover
Crossover frequencies for sector bound
Description
wc = getSectorCrossover(H,Q)
When a frequency-domain sector plot exists, these frequencies are the frequencies
at which the relative sector index (R-index) for H and
Q equals 1. See About Sector Bounds and Sector Indices for details.
Examples
Find the crossover frequencies for the dynamic system and the sector defined by:
for various values of a and b.
In U/Y space, this sector is the shaded region of the following diagram (for a, b > 0).
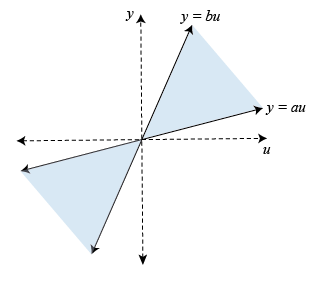
The Q matrix for this sector is given by:
getSectorCrossover finds the frequencies at which is singular, for . For instance, find these frequencies for the sector defined by Q with a = 0.1 and b = 10.
G = tf([1 2],[1 1]); H = [G;1]; a = 0.1; b = 10; Q = [1 -(a+b)/2 ; -(a+b)/2 a*b]; w = getSectorCrossover(H,Q)
w = 0×1 empty double column vector
The empty result means that there are no such frequencies.
Now find the frequencies at which is singular for a narrower sector, with a = 0.5 and b = 1.5.
a2 = 0.5; b2 = 1.5; Q2 = [1 -(a2+b2)/2 ; -(a2+b2)/2 a2*b2]; w2 = getSectorCrossover(H,Q2)
w2 = 1.7321
Here the resulting frequency is where the R-index for H and Q2 is equal to 1, as shown in the sector plot.
sectorplot(H,Q2)
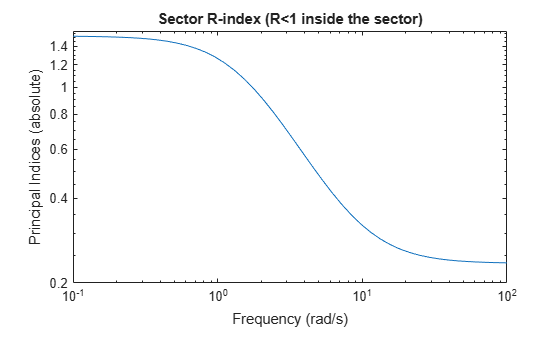
Thus, when a sector plot exists for a system H and sector Q, getSectorCrossover finds the frequencies at which the R-index is 1.
Input Arguments
Output Arguments
Version History
Introduced in R2016a