particleFilter
Particle filter object for online state estimation
Description
A particle filter is a recursive, Bayesian state estimator that uses discrete particles to approximate the posterior distribution of an estimated state. It is useful for online state estimation when measurements and a system model, that relates model states to the measurements, are available. The particle filter algorithm computes the state estimates recursively and involves initialization, prediction, and correction steps.
particleFilter creates an object for online state estimation of a
discrete-time nonlinear system using the discrete-time particle filter algorithm.
Consider a plant with states x, input u, output m, process noise w, and measurement noise y. Assume that you can represent the plant as a nonlinear system.
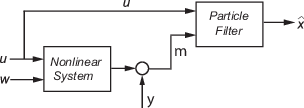
The algorithm computes the state estimates of the nonlinear system using the state transition and measurement likelihood functions you specify.
The software supports arbitrary nonlinear state transition and measurement models, with arbitrary process and measurement noise distributions.
To perform online state estimation, create the nonlinear state transition function and
measurement likelihood function. Then construct the particleFilter
object using these nonlinear functions. After you create the object:
Initialize the particles using the
initializecommand.Predict state estimates at the next step using the
predictcommand.Correct the state estimates using the
correctcommand.
The prediction step uses the latest state to predict the next state based on the state transition model you provide. The correction step uses the current sensor measurement to correct the state estimate. The algorithm optionally redistributes, or resamples, the particles in the state space to match the posterior distribution of the estimated state. Each particle represents a discrete state hypothesis of these state variables. The set of all particles is used to help determine the state estimate.
Creation
Object Description
pf = particleFilter(StateTransitionFcn,MeasurementLikelihoodFcn)StateTransitionFcn is a function that
calculates the particles (state hypotheses) at the next time step, given the
state vector at a time step. MeasurementLikelihoodFcn is a
function that calculates the likelihood of each particle based on sensor
measurements.
After creating the object, use the
initialize command to initialize the
particles with a known mean and covariance or uniformly distributed particles
within defined bounds. Then, use the correct and predict commands to update
particles (and hence the state estimate) using sensor measurements.
Input Arguments
Properties
Object Functions
initialize | Initialize the state of the particle filter |
predict | Predict state and state estimation error covariance at next time step using extended or unscented Kalman filter, or particle filter |
correct | Correct state and state estimation error covariance using extended or unscented Kalman filter, or particle filter and measurements |
getStateEstimate | Extract best state estimate and covariance from particles |
clone | Copy online state estimation object |
Examples
To create a particle filter object for estimating the states of your system, create appropriate state transition function and measurement likelihood function for the system.
In this example, the function vdpParticleFilterStateFcn describes a discrete-time approximation to van der Pol oscillator with nonlinearity parameter, mu, equal to 1. In addition, it models Gaussian process noise. vdpMeasurementLikelihood function calculates the likelihood of particles from the noisy measurements of the first state, assuming a Gaussian measurement noise distribution.
Create the particle filter object. Use function handles to provide the state transition and measurement likelihood functions to the object.
myPF = particleFilter(@vdpParticleFilterStateFcn,@vdpMeasurementLikelihoodFcn);
To initialize and estimate the states and state estimation error covariance from the constructed object, use the initialize, predict, and correct commands.
Copyright 2012 The MathWorks, Inc..
Load the van der Pol ODE data, and specify the sample time.
vdpODEdata.mat contains a simulation of the van der Pol ODE with nonlinearity parameter mu=1, using ode45, with initial conditions [2;0]. The true state was extracted with sample time dt = 0.05.
load ('vdpODEdata.mat','xTrue','dt') tSpan = 0:dt:5;
Get the measurements. For this example, a sensor measures the first state with a Gaussian noise with standard deviation 0.04.
sqrtR = 0.04; yMeas = xTrue(:,1) + sqrtR*randn(numel(tSpan),1);
Create a particle filter, and set the state transition and measurement likelihood functions.
myPF = particleFilter(@vdpParticleFilterStateFcn,@vdpMeasurementLikelihoodFcn);
Initialize the particle filter at state [2; 0] with unit covariance, and use 1000 particles.
initialize(myPF,1000,[2;0],eye(2));
Pick the mean state estimation and systematic resampling methods.
myPF.StateEstimationMethod = 'mean'; myPF.ResamplingMethod = 'systematic';
Estimate the states using the correct and predict commands, and store the estimated states.
xEst = zeros(size(xTrue)); for k=1:size(xTrue,1) xEst(k,:) = correct(myPF,yMeas(k)); predict(myPF); end
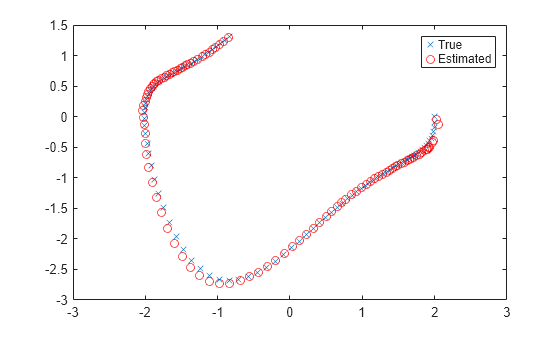
Plot the results, and compare the estimated and true states.
figure(1) plot(xTrue(:,1),xTrue(:,2),'x',xEst(:,1),xEst(:,2),'ro') legend('True','Estimated')
References
[1] T. Li, M. Bolic, P.M. Djuric, "Resampling Methods for Particle Filtering: Classification, implementation, and strategies," IEEE Signal Processing Magazine, vol. 32, no. 3, pp. 70-86, May 2015.
Extended Capabilities
Version History
Introduced in R2017b