place
Pole placement design
Description
Pole placement is a method of calculating the optimum gain matrix used to assign closed-loop poles to specified locations, thereby ensuring system stability. Closed-loop pole locations have a direct impact on time response characteristics such as rise time, settling time, and transient oscillations. For more information, see Pole Placement.
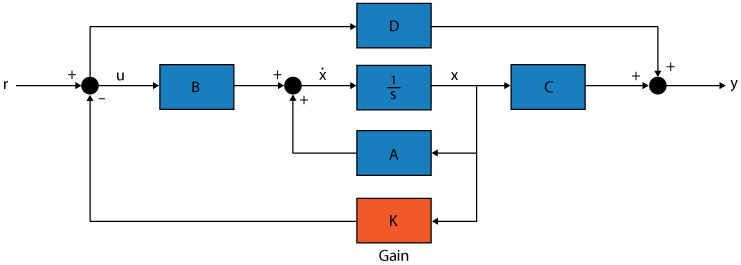
From the figure, consider a linear dynamic system in state-space form
For a given vector p of desired self-conjugate
closed-loop pole locations, place computes a gain matrix
K such that the state feedback u =
–Kx places the poles at the locations p. In other
words, the eigenvalues of A – BK will match the entries
of p (up to the ordering).
K = place(A,B,p)p by computing a state-feedback gain
matrix K. All the inputs of the plant are assumed to be control inputs.
place also works for multi-input systems and is based on the algorithm
from [1]. This algorithm uses
the extra degrees of freedom to find a solution that minimizes the sensitivity of the
closed-loop poles to perturbations in A or B.
[
also returns K,prec] = place(A,B,p)prec, an accuracy estimate of how closely the eigenvalues of
A – BK match the specified locations
p (prec measures the number of accurate decimal
digits in the actual closed-loop poles). A warning is issued if some nonzero closed-loop
pole is more than 10% off from the desired location.
Examples
For this example, consider a simple second-order system with the following state-space matrices:
Input the matrices and create the state-space system.
A = [-1,-2;1,0]; B = [2;0]; C = [0,1]; D = 0; sys = ss(A,B,C,D);
Compute the open-loop poles and check the step response of the open-loop system.
Pol = pole(sys)
Pol = 2×1 complex
-0.5000 + 1.3229i
-0.5000 - 1.3229i
figure(1)
step(sys)
hold on;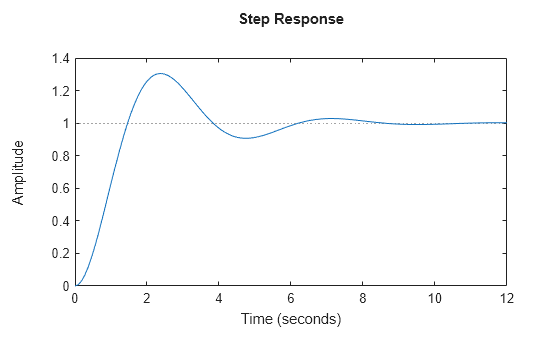
Notice that the resultant system is underdamped. Hence, choose real poles in the left half of the complex-plane to remove oscillations.
p = [-1,-2];
Find the gain matrix K using pole placement and check the closed-loop poles of syscl.
K = place(A,B,p); Acl = A-B*K; syscl = ss(Acl,B,C,D); Pcl = pole(syscl)
Pcl = 2×1
-2.0000
-1.0000
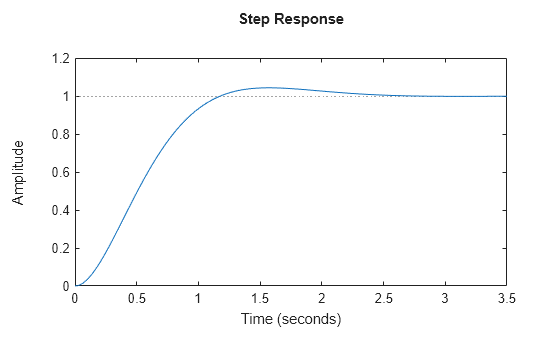
Now, compare the step response of the closed-loop system.
figure(1) step(syscl)
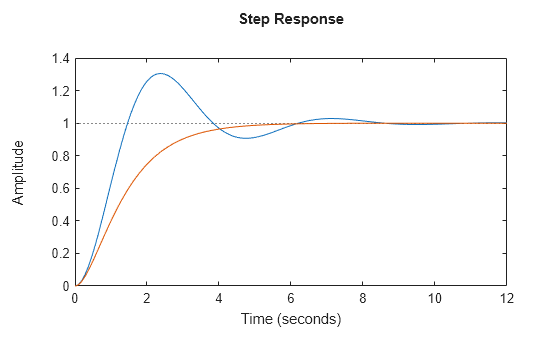
Hence, the closed-loop system obtained using pole placement is stable with good steady-state response.
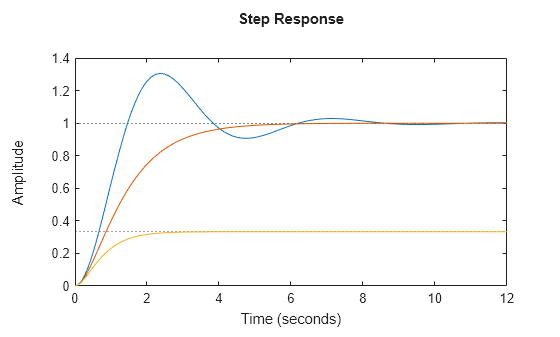
Note that choosing poles that are further away from the imaginary axis achieves faster response time but lowers the steady-state gain of the system. For instance, consider using the poles [-2,-3] for the above system.
p = [-2, -3]; K2 = place(A,B,p); syscl2 = ss(A-B*K2,B,C,D); figure(1); step(syscl2);
stepinfo(syscl)
ans = struct with fields:
RiseTime: 2.5901
TransientTime: 4.6002
SettlingTime: 4.6002
SettlingMin: 0.9023
SettlingMax: 0.9992
Overshoot: 0
Undershoot: 0
Peak: 0.9992
PeakTime: 7.7827
stepinfo(syscl2)
ans = struct with fields:
RiseTime: 1.4130
TransientTime: 2.4766
SettlingTime: 2.4766
SettlingMin: 0.3003
SettlingMax: 0.3331
Overshoot: 0
Undershoot: 0
Peak: 0.3331
PeakTime: 4.1216
For this example, consider the pole locations [-2e-13,-3e-4,-3e-3]. Compute the precision of the actual poles.
A = [4,2,1;0,-1,2;0,1e-8,1]; B = [1,2;3,1;1e-6,0]; p = [-2e-13,-3e-4,3e-3]; [~,prec] = place(A,B,p)
prec = 2
A precision value of 2 is obtained indicating that the actual pole locations are precise up to 2 decimal places.
For this example, consider the following transfer function with complex-conjugate poles at :
Input the transfer function model. Then, convert it to state-space form since place uses the A and B matrices as input arguments.
s = tf('s');
systf = 8/(s^2+4*s+2);
sys = ss(systf);Next, compute the gain matrix K using the complex-conjugate poles.
p = [-2+2i,-2-2i]; K = place(sys.A,sys.B,p)
K = 1×2
0 1.5000
The values of the gain matrix are real since the poles are self-conjugate. The values of K would be complex if p did not contain self-conjugate poles.
Now, verify the step response of the closed-loop system.
syscl = ss(sys.A-sys.B*K,sys.B,sys.C,sys.D); step(syscl)
For this example, consider the following SISO state-space model:
Create the SISO state-space model defined by the following state-space matrices:
A = [-1,-0.75;1,0]; B = [1;0]; C = [1,1]; D = 0; Plant = ss(A,B,C,D);
Now, provide a pulse to the plant and simulate it using lsim. Plot the output.
N = 250;
t = linspace(0,25,N);
u = [ones(N/2,1); zeros(N/2,1)];
x0 = [1;2];
[y,t,x] = lsim(Plant,u,t,x0);
figure
plot(t,y);
title('Output');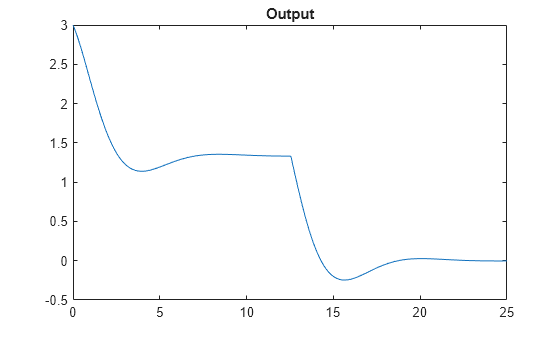
For this example, assume that all the state variables cannot be measured and only the output is measured. Hence, design an observer with this measurement. Use place to compute the estimator gain by transposing the A matrix and substituting C' for matrix B. For this instance, select the desired pole locations at -2 and -3.
L = place(A',C',[-2,-3])';
Use the estimator gain to substitute the state matrices using the principle of duality/separation and create the estimated state-space model.
At = A-L*C; Bt = [B,L]; Ct = [C;eye(2)]; sysObserver = ss(At,Bt,Ct,0);
Simulate the time response of the system using the same pulse input.
[observerOutput,t] = lsim(sysObserver,[u,y],t); yHat = observerOutput(:,1); xHat = observerOutput(:,[2 3]);
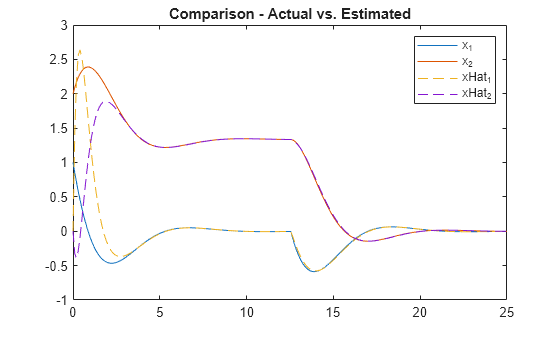
Compare the response of the actual system and the estimated system.
figure; plot(t,x); hold on; plot(t,xHat,'--'); legend('x_1','x_2','xHat_1','xHat_2') title('Comparison - Actual vs. Estimated');
Input Arguments
Output Arguments
Tips
You can use
placefor estimator gain selection by transposing theAmatrix and substitutingC'for matrixBas follows, as shown in Pole Placement Observer Design. You can use the resultant estimator gain for state estimator workflows usingestim.
References
[1] Kautsky, J., N.K. Nichols, and P. Van Dooren, "Robust Pole Assignment in Linear State Feedback," International Journal of Control, 41 (1985), pp. 1129-1155.
[2] Laub, A.J. and M. Wette, Algorithms and Software for Pole Assignment and Observers, UCRL-15646 Rev. 1, EE Dept., Univ. of Calif., Santa Barbara, CA, Sept. 1984.
Version History
Introduced before R2006a