Varying Delay
Varying delay with support for fixed delay and zero delay (direct feedthrough)
Since R2024a

Libraries:
Control System Toolbox /
Linear Parameter Varying
Description
The Varying Delay block extends the functionality of the Variable Transport Delay (Simulink) block in the Simulink /
Continuous library by providing additional support for specifying fixed
and zero delays. This block is helpful when you want to model a mix of zero, fixed, and
varying delays, which can occur in LPV models.
Examples
This example shows how to use the Varying Delay block provided with the Control System Toolbox™ library. This block is useful when you want to model a mix of fixed, varying, and zero delays for individual channels in the signal using just one block.
Open the model provided with this example.
mdl = "varyingDelayModel";
open_system(mdl)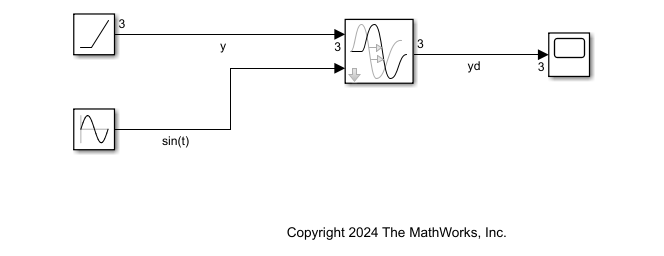
This model contains a ramp source with dimensions 3-by-1. The ramp signals have a slope of 1, 2, and 3 at the corresponding indices. The Sine Wave block generates a signal for the varying delay port.
For this model, specify:
A varying delay with a nominal delay of 1 s in the first channel of the ramp signal. The instantaneous value of the varying delay value is provided by the Sine Wave block.
A fixed delay of 3 s in the second channel of the ramp signal.
A zero delay (feedthrough) for the third channel of the ramp signal.
Configure the block parameters as shown.
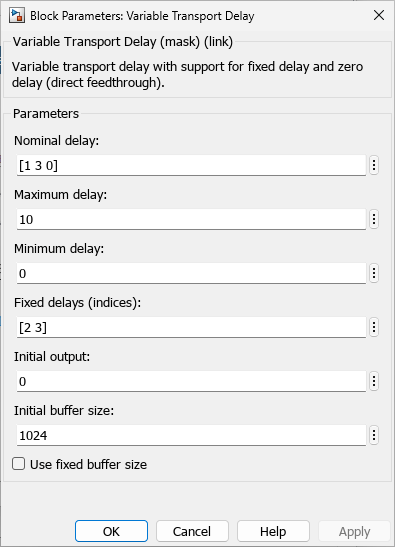
Specify the nominal delay parameter as a vector with values 1, 3, and 0 corresponding to the delays in each channel. Use the Fixed delays (indices) parameter to specify fixed delays for channels 2 and 3.
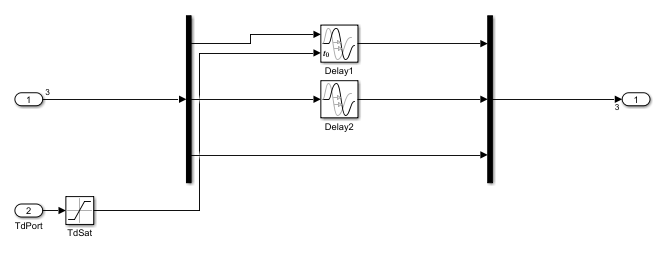
Examine the structure under the block mask. The block automatically configures the delays based on the specified settings. The varying delay input has a Saturation block to ensure that the delay is nonnegative. Therefore, it provides a delay of 0 when becomes negative.
Run the model and view the result.
sim(mdl);
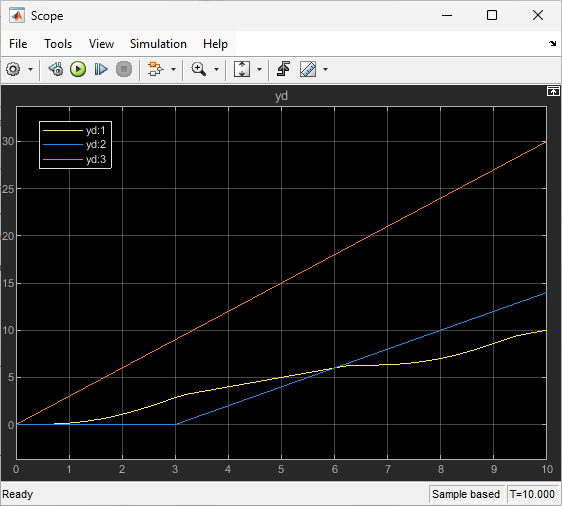
As you can see, the first channel has a varying sinusoidal delay, the second channel has a fixed delay of 3 s, and the third channel has zero delay.
close_system(mdl)
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2024a