Feedback Control Architectures in Control System Designer
When you open Control System Designer from MATLAB®, you can select one of six possible control architecture configurations.
| Configuration | Block Diagram | Features |
|---|---|---|
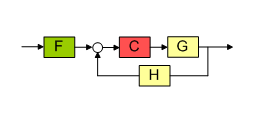
| 1 |
|
|
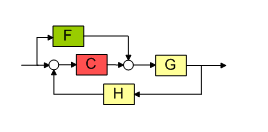
| 2 |
|
|
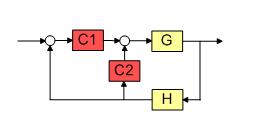
| 3 |
|
|
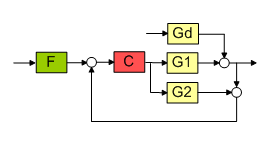
| 4 |
|
|
| 5 |
|
|
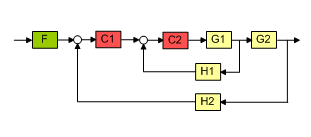
| 6 |
|
|

If your control application does not match one of the supported control architectures, you can use block diagram algebra to convert your system to match an architecture. For an example of such an application, see Design Multiloop Control System.
Note
If you are unable to match your application to one of the supported control architectures, consider using the Control System Tuner app to design your control system.
See Also
Control System Designer | sisoinit