fnder
Differentiate function
Description
fprime = fnder(f,dorder)dorder-th derivative of the function in f. The default value of dorder is 1. For negative dorder, the particular |dorder|-th indefinite integral is returned that vanishes |dorder|-fold at the left endpoint of the basic interval.
The output is of the same form as the input, they are either both ppforms, or both B-forms, or both stforms.
If the function in f is m-variate, then dorder must be given, and must be of length m.
Also:
If
fis in ppform, or in B-form with its last knot of sufficiently high multiplicity, then, up to rounding errors,fandfnder(fnint(f))are the same.If
fis in ppform andfais the value of the function infat the left end of its basic interval, then, up to rounding errors,fandfnint(fnder(f),fa)are the same, unless the function described byfhas jump discontinuities.If
fcontains the B-form of f, and t1 is its leftmost knot, then, up to rounding errors,fnint(fnder(f))contains the B-form of f – f(t1). However, its leftmost knot will have lost one multiplicity (if it had multiplicity > 1 to begin with). Also, its rightmost knot will have full multiplicity even if the rightmost knot for the B-form of f infdoesn't. To verify this, create a spline,sp = spmak([0 0 1], 1). This spline is, on its basic interval [0..1], the straight line that is 1 at 0 and 0 at 1. Now integrate its derivative:spdi = fnint(fnder(sp)). The spline inspdihas the same basic interval, but, on that interval, it agrees with the straight line that is 0 at 0 and –1 at 1.
fnder(f) is the same as fnder(f,1).
Examples
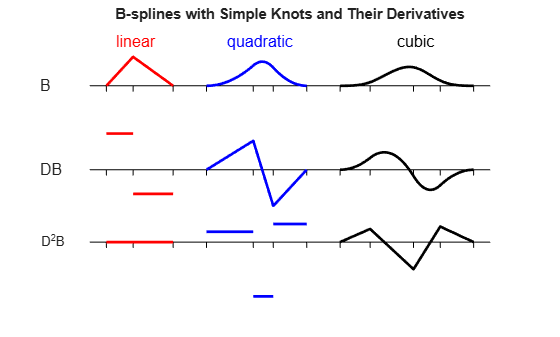
This example shows how to calculate the first and second order derivative functions of three B-splines of order 2, 3, and 4. Then it plots the splines, and their derivatives, and compares the results.
% Create the knots sequences t1 = [0 .8 2]; t2 = [3 4.4 5 6]; t3 = [7 7.9 9.2 10 11]; tt = [t1 t2 t3]; % Accessory variables and commands for plotting purposes cl = ['g','r','b','k','k']; v = 5.4; d1 = 2.5; d2 = 0; s1 = 1; s2 = .5; ext = tt([1 end])+[-.5 .5]; plot(ext([1 2]),[v v],cl(5)) hold on plot(ext([1 2]),[d1 d1],cl(5)) plot(ext([1 2]),[d2 d2],cl(5)) ts = [tt;tt;NaN(size(tt))]; ty = repmat(.2*[-1;0;NaN],size(tt)); plot(ts(:),ty(:)+v,cl(5)) plot(ts(:),ty(:)+d1,cl(5)) plot(ts(:),ty(:)+d2,cl(5)) % Spline 1 (linear) b1 = spmak(t1,1); p1 = [t1;0 1 0]; % Calculate the first and second derivative of spline 1 db1 = fnder(b1); p11 = fnplt(db1,'j'); p12 = fnplt(fnder(db1)); lw = 2; plot(p1(1,:),p1(2,:)+v,cl(2),'LineWidth',lw) plot(p11(1,:),s1*p11(2,:)+d1,cl(2),'LineWidth',lw) plot(p12(1,:),s2*p12(2,:)+d2,cl(2),'LineWidth',lw) % Spline 2 (quadratic) b1 = spmak(t2,1); p1 = fnplt(b1); % Calculate the first and second derivative of spline 2 db1 = fnder(b1); p11 = [t2;fnval(db1,t2)]; p12 = fnplt(fnder(db1),'j'); plot(p1(1,:),p1(2,:)+v,cl(3),'LineWidth',lw) plot(p11(1,:),s1*p11(2,:)+d1,cl(3),'LineWidth',lw) plot(p12(1,:),s2*p12(2,:)+d2,cl(3),'LineWidth',lw) % Spline 3 (cubic) b1 = spmak(t3,1); p1 = fnplt(b1); % Calculate the first and second derivative of spline 3 db1 = fnder(b1); p11 = fnplt(db1); p12=[t3;fnval(fnder(db1),t3)]; plot(p1(1,:),p1(2,:)+v,cl(4),'LineWidth',lw) plot(p11(1,:),s1*p11(2,:)+d1,cl(4),'LineWidth',lw) plot(p12(1,:),s2*p12(2,:)+d2,cl(4),'LineWidth',lw) % Formatting the plot tey = v+1.5; text(t1(2)-.5,tey,'linear','FontSize',12,'Color',cl(2)) text(t2(2)-.8,tey,'quadratic','FontSize',12,'Color',cl(3)) text(t3(3)-.5,tey,'cubic','FontSize',12,'Color',cl(4)) text(-2,v,'B','FontSize',12) text(-2,d1,'DB','FontSize',12) text(-2,d2,'D^2B') axis([-1 12 -2 7.5]) title({'B-splines with Simple Knots and Their Derivatives'}) axis off hold off
Input Arguments
Output Arguments
Limitations
The
fnderfunction does not work with rational splines. To work with rational splines, use thefntlrfunction instead.The
fnderfunction works for stforms only in a limited way: if the type istp00, thendordercan be[1,0]or[0,1].
Algorithms
For differentiation of either polynomial form, the fnder function finds the derivatives in the piecewise-polynomial sense. The function differentiates each polynomial piece separately, and ignores jump discontinuities between polynomial pieces during differentiation.
For the B-form, the function uses the [PGS; (X.10)] formulas for differentiation.
For the stform, differentiation relies on knowing a formula for the relevant derivative of the basis function of the particular type.
Version History
Introduced before R2006a