inflationCollisionChecker
Collision-checking configuration for costmap based on inflation
Description
The inflationCollisionChecker function creates an
InflationCollisionChecker object, which holds the collision-checking configuration of a
vehicle costmap. A vehicle costmap with this configuration inflates the size of obstacles in
the vehicle environment. This inflation is based on the specified InflationCollisionChecker
properties, such as the dimensions of the vehicle and the radius of circles required to
enclose the vehicle. For more details, see Algorithms. Path planning
algorithms, such as pathPlannerRRT,
use this costmap collision-checking configuration to avoid inflated obstacles and plan
collision-free paths through an environment.
Use the InflationCollisionChecker object to set the
CollisionChecker property of your vehicleCostmap
object. This collision-checking configuration affects the return values of the checkFree and
checkOccupied
functions used by vehicleCostmap. These values indicate whether a vehicle
pose is free or occupied.
Creation
Syntax
Description
ccConfig = inflationCollisionChecker creates an
InflationCollisionChecker object, ccConfig, that
holds the collision-checking configuration of a vehicle costmap. This object uses one
circle to enclose the vehicle. The dimensions of the vehicle correspond to the values of a
default vehicleDimensions object.
ccConfig = inflationCollisionChecker(vehicleDims) specifies the
dimensions of the vehicle, where vehicleDims is a
vehicleDimensions object. The vehicleDims input
sets the VehicleDimensions property of ccConfig.
ccConfig = inflationCollisionChecker(
also specifies the number of circles used to enclose the vehicle. The
vehicleDims,numCircles)numCircles input sets the NumCircles property of ccConfig.
ccConfig = inflationCollisionChecker(___,
sets the Name,Value)CenterPlacements and InflationRadius properties using name-value pairs and the inputs from any of
the preceding syntaxes. Enclose each property name in quotes.
Example: inflationCollisionChecker('CenterPlacements',[0.2 0.5
0.8],'InflationRadius',1.2)
Properties
Number of circles used to enclose the vehicle and calculate the inflation radius, specified as a positive integer. Typical values are from 1 to 5.
For faster but more conservative collision checking, decrease the number of circles. This approach improves performance because the path planning algorithm makes fewer collision checks.
For slower but more precise collision checking, increase the number of circles. This approach is useful when planning a path around tight corners or through narrow corridors, such as in a parking lot.
Normalized placement of circle centers along the longitudinal axis of the vehicle,
specified as a 1-by-NumCircles vector of real values in the range [0, 1].
A value of 0 places a circle center at the rear of the vehicle.
A value of 1 places a circle center at the front of the vehicle.

Specify CenterPlacements when you want to align the circles
with exact positions on the vehicle. If you leave CenterPlacements
unspecified, the object computes the center placements so that the circles completely
enclose the vehicle. If you change the number of center placements,
NumCircles is updated to the number of elements in
CenterPlacements.
Vehicle dimensions used to compute the inflation radius, specified as a vehicleDimensions object. By default, the InflationCollisionChecker
object uses the dimensions of a default vehicleDimensions object.
Vehicle dimensions are in world units.
Inflation radius, specified as a nonnegative real number. By default, the object
computes the inflation radius based on the values of NumCircles, CenterPlacements, and VehicleDimensions. For more details, see Algorithms.
Object Functions
plot | Plot collision configuration |
Examples
Plan a vehicle path to a narrow parking spot by using the optimized rapidly exploring random tree (RRT*) algorithm. Try different collision-checking configurations in the costmap used by the RRT* path planner.
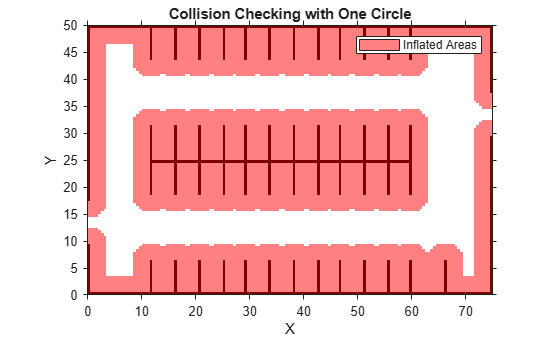
Load and display a costmap of a parking lot. The costmap is a vehicleCostmap object. By default, vehicleCostmap uses a collision-checking configuration that inflates obstacles based on a radius of only one circle enclosing the vehicle. The costmap overinflates the obstacles (the parking spot boundaries).
data = load('parkingLotCostmap.mat'); costmap = data.parkingLotCostmap; figure plot(costmap) title('Collision Checking with One Circle')
Use inflationCollisionChecker to create a new collision-checking configuration for the costmap.
To decrease inflation of the obstacles, increase the number of circles enclosing the vehicle.
To specify the dimensions of the vehicle, use a
vehicleDimensionsobject.
Specify the collision-checking configuration in the CollisionChecker property of the costmap.
vehicleDims = vehicleDimensions(4.5,1.7); % 4.5 m long, 1.7 m wide
numCircles = 3;
ccConfig = inflationCollisionChecker(vehicleDims,numCircles);
costmap.CollisionChecker = ccConfig;Display the costmap with the new collision-checking configuration. The inflated areas are reduced.
figure
plot(costmap)
title('Collision Checking with Three Circles')
Define a planning problem: a vehicle starts near the left entrance of the parking lot and ends in a parking spot.
startPose = [11 10 0]; % [meters, meters, degrees]
goalPose = [31.5 17 90]; Use a pathPlannerRRT object to plan a path to the parking spot. Plot the planned path.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose); hold on plot(refPath) hold off

Create a collision-checking configuration for a costmap. Manually specify the circle centers so that they fully enclose the vehicle.
Define the dimensions of a vehicle by using a vehicleDimensions object.
length = 5; % meters width = 2; % meters vehicleDims = vehicleDimensions(length,width);
Define three circle centers and the inflation radius to use for collision checking. Place one center at the vehicle's midpoint. Offset the other two centers by an equal amount on either end of the vehicle.
distFromSide = 0.175; centerPlacements = [distFromSide 0.5 1-distFromSide]; inflationRadius = 1.2;
Create and display the collision-checking configuration.
ccConfig = inflationCollisionChecker(vehicleDims, ... 'CenterPlacements',centerPlacements,'InflationRadius',inflationRadius); figure plot(ccConfig)
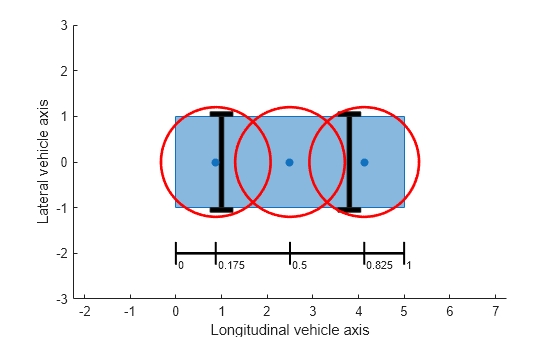
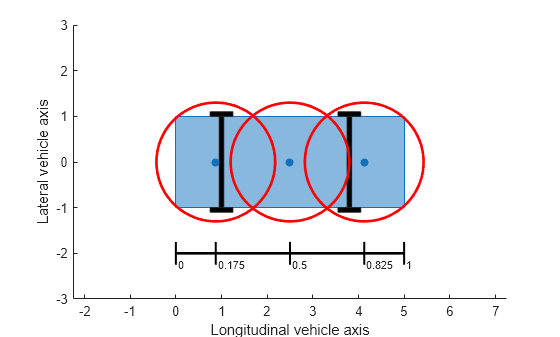
In this configuration, the corners of the vehicle are not enclosed within the circles. To fully enclose the vehicle, increase the inflation radius. Display the updated configuration.
ccConfig.InflationRadius = 1.3; plot(ccConfig)
Use this collision-checking configuration to create a 10-by-20 meter costmap.
costmap = vehicleCostmap(10,20,0.1,'CollisionChecker',ccConfig);Tips
To visually verify that the circles completely enclose the vehicle, use the
plotfunction. If the circles do not completely enclose the vehicle, some of the free poses returned bycheckFree(or unoccupied poses returned bycheckOccupied) might actually be in collision.
Algorithms
The InflationRadius property of InflationCollisionChecker determines the amount,
in world units, by which to inflate obstacles. By default,
InflationRadius is equal to the radius of the smallest set of
overlapping circles required to completely enclose the vehicle, as determined by the following
properties:
NumCircles— Number of circles used to enclose the vehicleCenterPlacements— Placements of the circle centers along the longitudinal axis of the vehicleVehicleDimensions— Dimensions of the vehicle
For more details about how this collision-checking configuration defines inflated areas in
a costmap, see the Algorithms section of
vehicleCostmap.
References
[1] Ziegler, J., and C. Stiller. "Fast Collision Checking for Intelligent Vehicle Motion Planning." IEEE Intelligent Vehicle Symposium. June 21–24, 2010.
Extended Capabilities
Version History
Introduced in R2018b