road
Add road to driving scenario or road group
Syntax
Description
Add Roads To Driving Scenario
road(
adds a road to a driving scenario, scenario,roadcenters)scenario. You specify
the road shape and the orientation of a road in the 2-D plane by using a set of
road centers, roadcenters, at discrete points. When you
specify the number of lanes on a road, the lanes are numbered with respect to
the road centers. For more information, see Draw Direction of Road and Numbering of Lanes.
road(
adds a road with the specified width, scenario,roadcenters,roadwidth)roadwidth.
road(
adds a road with the specified width and banking angle,
scenario,roadcenters,roadwidth,bankingangle)bankingangle.
road(
adds a road with the specified lanes, scenario,roadcenters,'Lanes',lspec)lspec.
road(
adds a road with the specified banking angle and lanes.scenario,roadcenters,bankingangle,'Lanes',lspec)
road(___,'Heading',
adds a road with the specified heading angle roadheadings)roadheadings,
using any of the input argument combinations from previous syntaxes.
road(___,'Name',
specifies the name of the road.name)
rd = road(___)Road object that stores the properties of the created
road.
Add Roads to Road Group
road(
adds a road segment to a road group, rg,roadcenters)rg. Use a road group
to create a road junction or intersection. You specify the shape and the
orientation of the road segment in the 2-D plane by using a set of road centers,
roadcenters, at discrete points. When you specify the
number of lanes on a road segment, the lanes are numbered with respect to the
road centers. For more information, see Draw Direction of Road and Numbering of Lanes.
road(
adds a road segment with the specified width, rg,roadcenters,roadwidth)roadwidth, to
the road group.
road(
adds a road segment with the specified width and banking angle,
rg,roadcenters,roadwidth,bankingangle)bankingangle, to the road group.
road(
adds a road segment with the specified lanes, rg,roadcenters,'Lanes',lspec)lspec, to the
road group.
road(
adds a road segment with the specified banking angle and lanes to the road
group.rg,roadcenters,bankingangle,'Lanes',lspec)
road(___,'Heading',
adds a road segment with the specified heading angle
roadheadings)roadheadings to the road group, using any of the input
argument combinations from previous syntaxes.
Examples
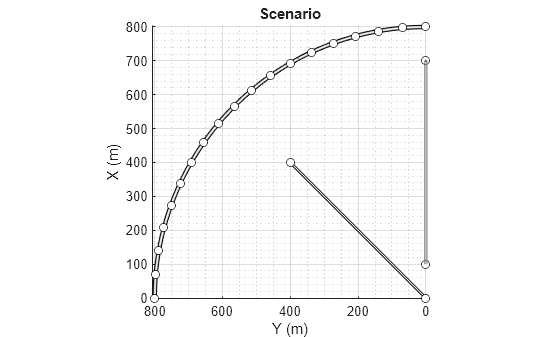
Create a driving scenario containing a curved road, two straight roads, and two actors: a car and a bicycle. Both actors move along the road for 60 seconds.
Create the driving scenario object.
scenario = drivingScenario('SampleTime',0.1','StopTime',60);
Create the curved road using road center points following the arc of a circle with an 800-meter radius. The arc starts at 0°, ends at 90°, and is sampled at 5° increments.
angs = [0:5:90]'; R = 800; roadcenters = R*[cosd(angs) sind(angs) zeros(size(angs))]; roadwidth = 10; cr = road(scenario,roadcenters,roadwidth);
Add two straight roads with the default width, using road center points at each end. To the first straight road add barriers on both road edges.
roadcenters = [700 0 0; 100 0 0]; sr1 = road(scenario,roadcenters); barrier(scenario,sr1) barrier(scenario,sr1,'RoadEdge','left') roadcenters = [400 400 0; 0 0 0]; road(scenario,roadcenters);
Get the road boundaries.
rbdry = roadBoundaries(scenario);
Add a car and a bicycle to the scenario. Position the car at the beginning of the first straight road.
car = vehicle(scenario,'ClassID',1,'Position',[700 0 0], ... 'Length',3,'Width',2,'Height',1.6);
Position the bicycle farther down the road.
bicycle = actor(scenario,'ClassID',3,'Position',[706 376 0]', ... 'Length',2,'Width',0.45,'Height',1.5);
Plot the scenario.
plot(scenario,'Centerline','on','RoadCenters','on'); title('Scenario');
Display the actor poses and profiles.
allActorPoses = actorPoses(scenario)
allActorPoses=242×1 struct array with fields:
ActorID
Position
Velocity
Roll
Pitch
Yaw
AngularVelocity
allActorProfiles = actorProfiles(scenario)
allActorProfiles=242×1 struct array with fields:
ActorID
ClassID
Length
Width
Height
OriginOffset
MeshVertices
MeshFaces
RCSPattern
RCSAzimuthAngles
RCSElevationAngles
Because there are barriers in this scenario, and each barrier segment is considered an actor, actorPoses and actorProfiles functions return the poses of all stationary and non-stationary actors. To only obtain the poses and profiles of non-stationary actors such as vehicles and bicycles, first obtain their corresponding actor IDs using the scenario.Actors.ActorID property.
movableActorIDs = [scenario.Actors.ActorID];
Then, use those IDs to filter only non-stationary actor poses and profiles.
movableActorPoseIndices = ismember([allActorPoses.ActorID],movableActorIDs); movableActorPoses = allActorPoses(movableActorPoseIndices)
movableActorPoses=2×1 struct array with fields:
ActorID
Position
Velocity
Roll
Pitch
Yaw
AngularVelocity
movableActorProfiles = allActorProfiles(movableActorPoseIndices)
movableActorProfiles=2×1 struct array with fields:
ActorID
ClassID
Length
Width
Height
OriginOffset
MeshVertices
MeshFaces
RCSPattern
RCSAzimuthAngles
RCSElevationAngles
Create a driving scenario containing a figure-8 road specified in the world coordinates of the scenario. Convert the world coordinates of the scenario to the coordinate system of the ego vehicle.
Create an empty driving scenario.
scenario = drivingScenario;
Add a figure-8 road to the scenario. Display the scenario.
roadCenters = [0 0 1
20 -20 1
20 20 1
-20 -20 1
-20 20 1
0 0 1];
roadWidth = 3;
bankAngle = [0 15 15 -15 -15 0];
road(scenario,roadCenters,roadWidth,bankAngle);
plot(scenario)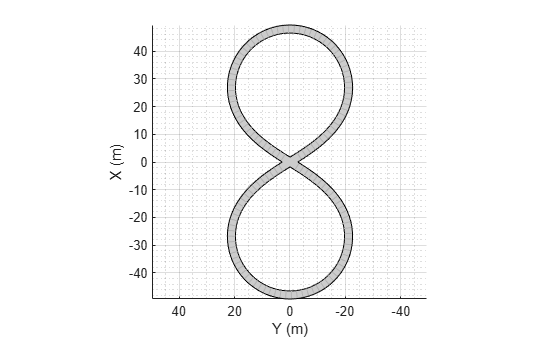
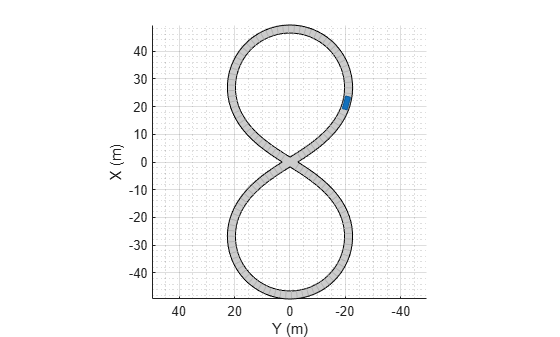
Add an ego vehicle to the scenario. Position the vehicle at world coordinates (20, –20) and orient it at a –15 degree yaw angle.
ego = actor(scenario,'ClassID',1,'Position',[20 -20 0],'Yaw',-15);
Warning: Class ID 1 is not supported for an actor. The drivingScenario object created a vehicle instead. ClassID of actor must be one of these values: 3 (Bicycle), 4 (Pedestrian), 5 (Jersey Barrier), or 6 (Guardrail).
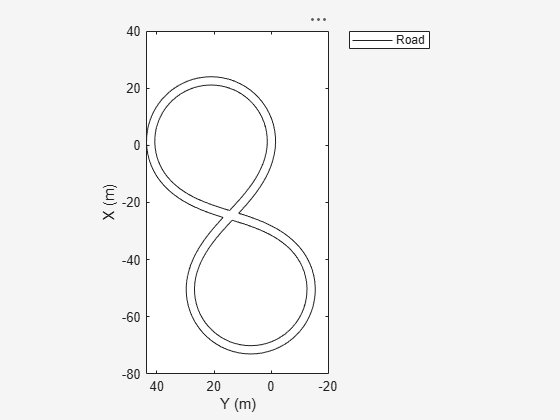
Obtain the road boundaries in ego vehicle coordinates by using the roadBoundaries function. Specify the ego vehicle as the input argument.
rbEgo1 = roadBoundaries(ego);
Display the result on a bird's-eye plot.
bep = birdsEyePlot; lbp = laneBoundaryPlotter(bep,'DisplayName','Road'); plotLaneBoundary(lbp,rbEgo1)
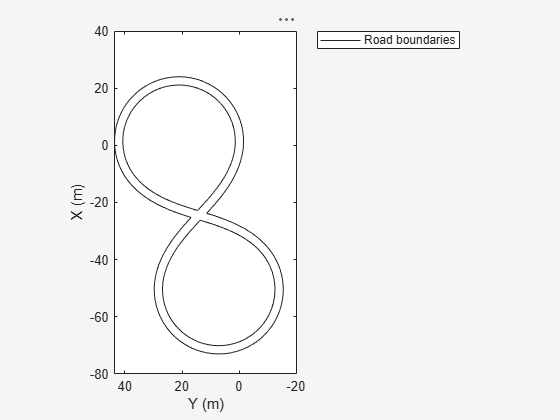
Obtain the road boundaries in world coordinates by using the roadBoundaries function. Specify the scenario as the input argument.
rbScenario = roadBoundaries(scenario);
Obtain the road boundaries in ego vehicle coordinates by using the driving.scenario.roadBoundariesToEgo function.
rbEgo2 = driving.scenario.roadBoundariesToEgo(rbScenario,ego);
Display the road boundaries on a bird's-eye plot.
bep = birdsEyePlot; lbp = laneBoundaryPlotter(bep,'DisplayName','Road boundaries'); plotLaneBoundary(lbp,{rbEgo2})
Create a driving scenario containing a car and pedestrian on a straight road. Then, create and display the lane markings of the road on a bird's-eye plot.
Create an empty driving scenario.
scenario = drivingScenario;
Create a straight, 25-meter road segment with two travel lanes in one direction.
lm = [laneMarking('Solid') laneMarking('Dashed','Length',2,'Space',4) laneMarking('Solid')]; l = lanespec(2,'Marking',lm); road(scenario,[0 0 0; 25 0 0],'Lanes',l);
Add to the driving scenario a pedestrian crossing the road at 1 meter per second and a car following the road at 10 meters per second.
ped = actor(scenario,'ClassID',4,'Length',0.2,'Width',0.4,'Height',1.7); car = vehicle(scenario,'ClassID',1); smoothTrajectory(ped,[15 -3 0; 15 3 0],1); smoothTrajectory(car,[car.RearOverhang 0 0; 25-car.Length+car.RearOverhang 0 0],10);
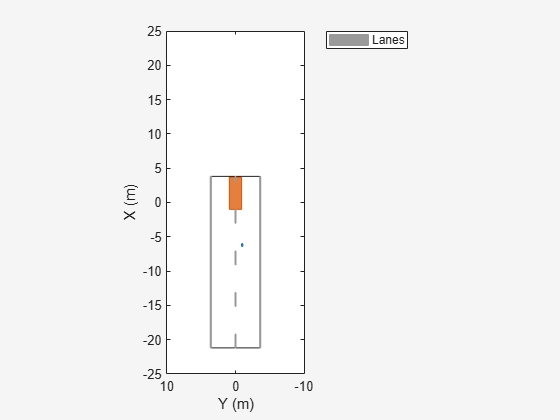
Display the scenario and corresponding chase plot.
plot(scenario)
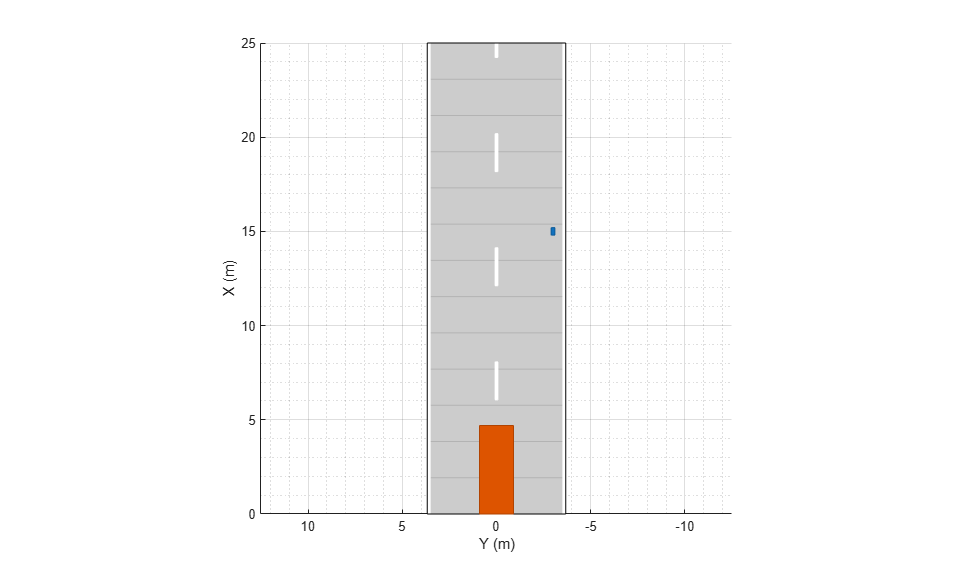
chasePlot(car)
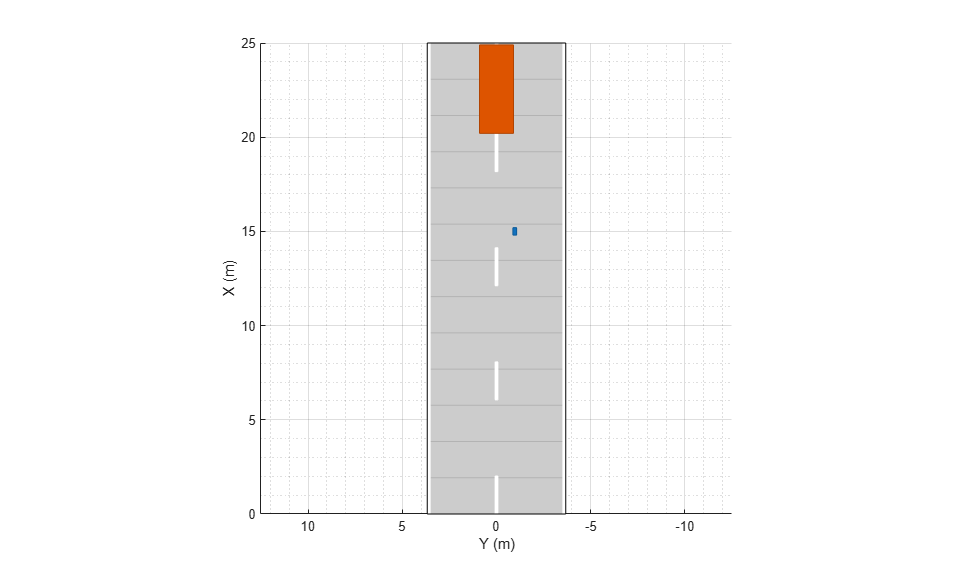
Run the simulation.
Create a bird's-eye plot.
Create an outline plotter, lane boundary plotter, and lane marking plotter for the bird's-eye plot.
Obtain the road boundaries and target outlines.
Obtain the lane marking vertices and faces.
Display the lane boundaries and lane markers.
Run the simulation loop.
bep = birdsEyePlot('XLim',[-25 25],'YLim',[-10 10]); olPlotter = outlinePlotter(bep); lbPlotter = laneBoundaryPlotter(bep); lmPlotter = laneMarkingPlotter(bep,'DisplayName','Lanes'); legend('off'); while advance(scenario) rb = roadBoundaries(car); [position,yaw,length,width,originOffset,color] = targetOutlines(car); [lmv,lmf] = laneMarkingVertices(car); plotLaneBoundary(lbPlotter,rb); plotLaneMarking(lmPlotter,lmv,lmf); plotOutline(olPlotter,position,yaw,length,width, ... 'OriginOffset',originOffset,'Color',color); end
Create a driving scenario containing two curved roads to connect. Specify the heading angles of each road center to fine-tune the shape of the road at the connecting region.
Create an empty driving scenario.
scenario = drivingScenario;
Add two roads to the driving scenario by defining their road centers and road heading angles.
% Add the first road roadCenters = [-7 20; 0 0; 30 0; 30 -20; 10 -30]; roadHeadings = [-90; 0; NaN; NaN; -90]; laneMark = laneMarking('Solid'); laneSpecification = lanespec(2,Marking=laneMark); road(scenario,roadCenters,'Lanes',laneSpecification, ... 'Heading',roadHeadings,'Name','Road 1'); %Add the second road roadCenters = [10 -30; 30 -40; 30 -60; 0 -60; -7 -80]; roadHeadings = [-90; NaN; NaN; 180; -90]; laneMark = laneMarking('Dashed'); laneSpecification = lanespec(2,Marking=laneMark); road(scenario,roadCenters,'Lanes',laneSpecification, ... 'Heading',roadHeadings,'Name','Road 2');
Plot the scenario.
plot(scenario,'RoadCenters','on')

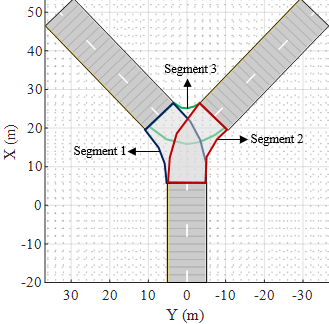
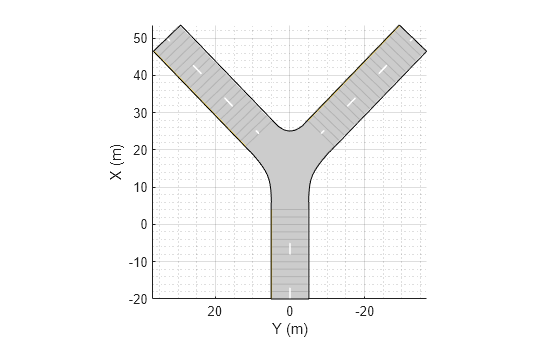
A three-way intersection is a Y-Junction in which two adjacent roads intersect the third road at an obtuse angle, as shown in this figure. To connect the three roads, you will create a Y-Junction by adding three road segments.
Add Three Roads to Driving Scenario
Create an empty driving scenario.
scenario = drivingScenario;
Specify the number of lanes and the width of each lane in the roads.
ls = lanespec(2,'Width',5);Define the road centers for three roads and add them to the driving scenario. The first road is diagonally oriented to the left of the scenario canvas, second road is diagonally oriented to the right of the scenario canvas, and the third road is oriented vertically.
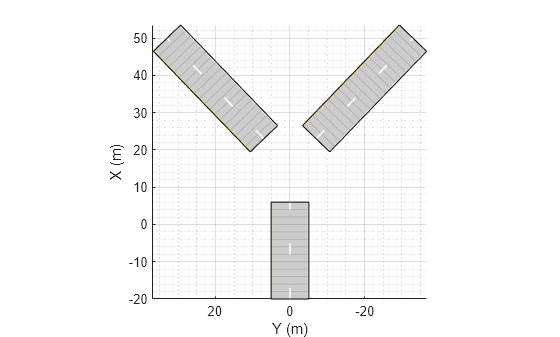
% Add the first road roadCenters = [-20 0; 6 0]; road(scenario,roadCenters,'Name','Road 1','Lanes',ls); % Add the second road roadCenters = [23 7; 50 33]; road(scenario,roadCenters,'Name','Road 2','Lanes',ls); % Add the third road roadCenters = [23 -7; 50 -33]; road(scenario,roadCenters,'Name','Road 3','Lanes',ls);
Plot the scenario.
figure plot(scenario)
Create Y-Junction to Connect Roads
Create a RoadGroup object. Specify the width for each road segment that forms the Y-junction.
rg = driving.scenario.RoadGroup('Name','Y-Junction'); roadWidth = 10;
Specify the road centers for three road segments, and add these road segments to the RoadGroup object by using the road function. These road segments intersect with each other.
% Add the first road segment roadCenters = [23 7; 14 1; 6 0]; road(rg,roadCenters,roadWidth,'Name','Segment 1'); % Add the second road segment roadCenters = [23 -7; 14 -1; 6 0]; road(rg,roadCenters,roadWidth,'Name','Segment 2'); % Add the third road segment roadCenters = [23 7; 21 4; 21 -4; 23 -7]; road(rg,roadCenters,roadWidth,'Name','Segment 3');
Add Y-Junction to Driving Scenario
Add the road segments stored in the RoadGroup object to the driving scenario by using the roadGroup function. The road segments form a Y-Junction that connects the three roads in the driving scenario.
roadGroup(scenario,rg);
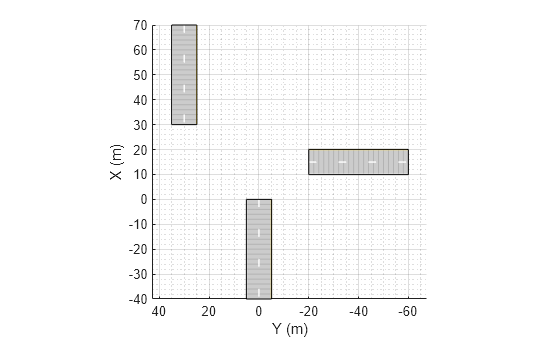
Create a driving scenario with three roads, and use a road junction to connect them, as shown in this figure.
Add Three Roads to Driving Scenario
Create an empty driving scenario.
scenario = drivingScenario;
Specify the number of lanes and the width of each lane in the roads.
ls = lanespec(2,'Width',5);Define the road centers for three roads and add them to the driving scenario. The first and second roads are vertically oriented, to the left and to the center of the scenario canvas respectively. The third road is horizontally oriented, to the right of the first two roads and between them vertically.
% Add the first road roadCenters = [70 30; 30 30]; road(scenario,roadCenters,'Name','Road 1','Lanes',ls); % Add the second road roadCenters = [0 0; -40 0]; road(scenario,roadCenters,'Name','Road 2','Lanes',ls); % Add the third road roadCenters = [15 -20; 15 -60]; road(scenario,roadCenters,'Name','Road 3','Lanes',ls);
Plot the scenario.
plot(scenario)
Create a Junction to Connect Roads
Create a RoadGroup object. Specify the width of each road segment that forms the junction.
rg = driving.scenario.RoadGroup('Name','Junction'); roadWidth = 10;
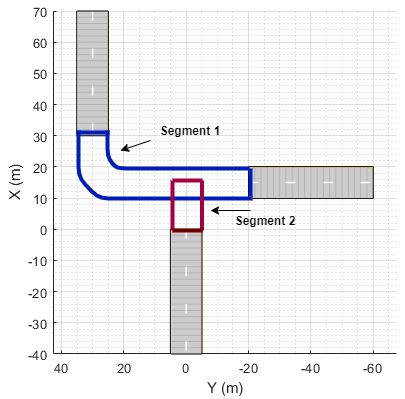
Specify the road centers for two road segments, and specify heading angles for the first road segment. Add these road segments to the RoadGroup object by using the road function. These road segments intersect each other.
%Add the first road segment and specify its heading angles roadCenters = [31 30; 15 20; 15 -21]; roadHeadings = [180; -90; -90]; road(rg,roadCenters,roadWidth, ... 'Name','Segment 1','Heading',roadHeadings); % Add the second road segment roadCenters = [15 0; -1 0]; road(rg,roadCenters,roadWidth, ... 'Name','Segment 2');
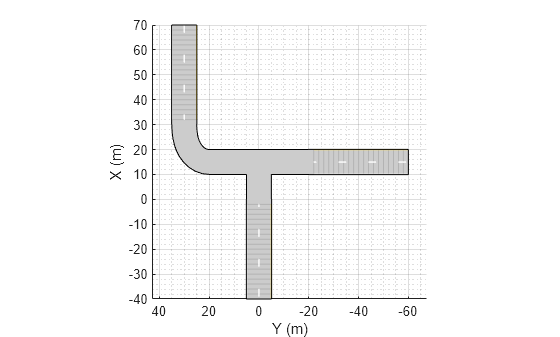
Add Junction to Driving Scenario
Add the road segments stored in the RoadGroup object to the driving scenario by using the roadGroup function. The road segments form a junction that connects the three roads in the driving scenario.
roadGroup(scenario,rg);
Input Arguments
Output Arguments
More About
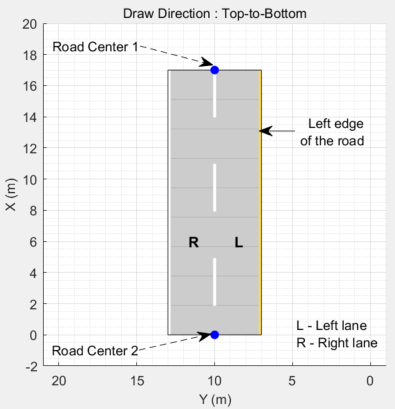
To create a road by using the road function, specify the road centers as a
matrix input. The function creates a directed line that traverses the road centers, starting
from the coordinates in the first row of the matrix and ending at the coordinates in the last
row of the matrix. The coordinates in the first two rows of the matrix specify the
draw direction of the road. These coordinates correspond to the first
two consecutive road centers. The draw direction is the direction in which the roads render in
the scenario plot.
To create a road by using the Driving Scenario Designer app, you can either specify the Road Centers parameter or interactively draw on the Scenario Canvas. For a detailed example, see Create a Driving Scenario. In this case, the draw direction is the direction in which roads render in the Scenario Canvas.
For a road with a top-to-bottom draw direction, the difference between the x-coordinates of the first two consecutive road centers is positive.
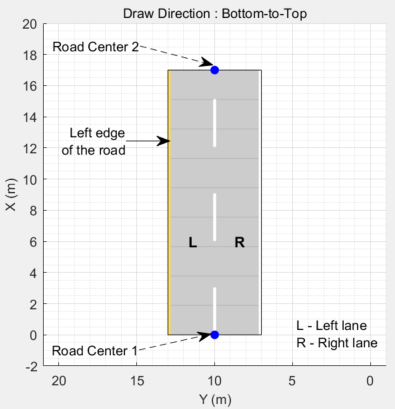
For a road with a bottom-to-top draw direction, the difference between the x-coordinates of the first two consecutive road centers is negative.
|
|
|
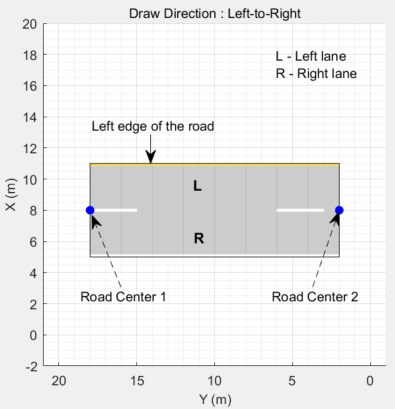
For a road with a left-to-right draw direction, the difference between the y-coordinates of the first two consecutive road centers is positive.
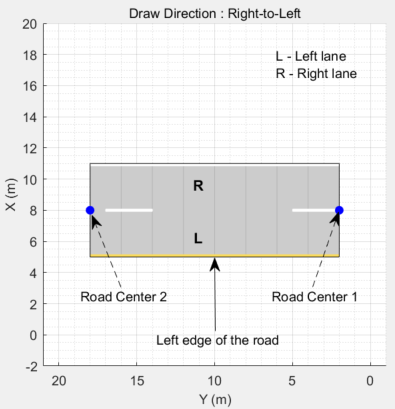
For a road with a right-to-left draw direction, the difference between the y-coordinates of the first two consecutive road centers is negative.
|
|
|
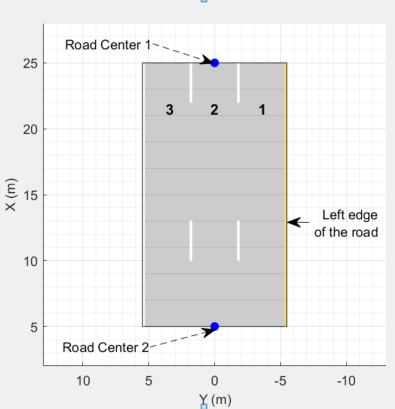
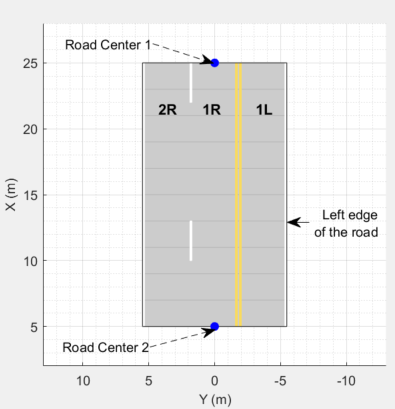
Lanes must be numbered from left to right, with the left edge of the road defined relative to the draw direction of the road. For a one-way road, by default, the left edge of the road is a solid yellow marking which indicates the end of the road in transverse direction (direction perpendicular to draw direction). For a two-way road, by default, both edges are marked with solid white lines.
For example, these diagrams show how the lanes are numbered in a one-way and two-way road with a draw direction from top-to-bottom.
| Numbering Lanes in a One-Way Road | Numbering Lanes in a Two-Way Road |
Specify the number of lanes as a positive integer for a one-way road. If
you set the integer value as 1, 2, 3 denote the first, second, and third lanes of the road, respectively.
| Specify the number of lanes as a two-element vector of positive integer
for a two-way road. If you set the vector as [ 1L denote the only left lane of the road. 1R and 2R denote the first and second right lanes of the road, respectively.
|
The lane specifications apply by the order in which the lanes are numbered.
The heading angle refers to the angle of the road at a given road center point heading towards the next road center, measured counterclockwise with respect to the x-axis in the range [–180, 180] degrees.
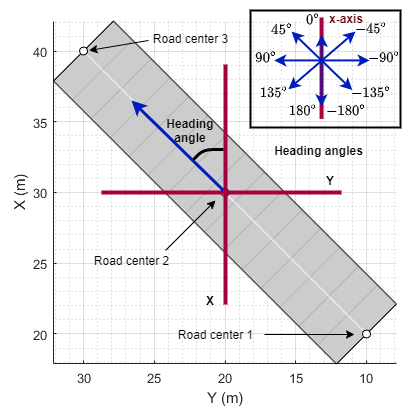
Specifying heading angles as a constraint to the road center points enables precise control over the shape and orientation of the roads.
For example, create a road by specifying its road centers. Plot the road
scenario = drivingScenario; roadCenters = [0 35; 0 18; 15 10; 32 3; 32 -12]; roadHeadings = [NaN; NaN; 0; NaN; NaN]; road(scenario,roadCenters,'Heading',roadHeadings); plot(scenario,'Centerline','on','RoadCenters','on')
This figure shows the road with one constrained road heading angle and its
respective road center specified in this example. The other road centers are
unconstrained and their heading angles are determined automatically by the
road function.
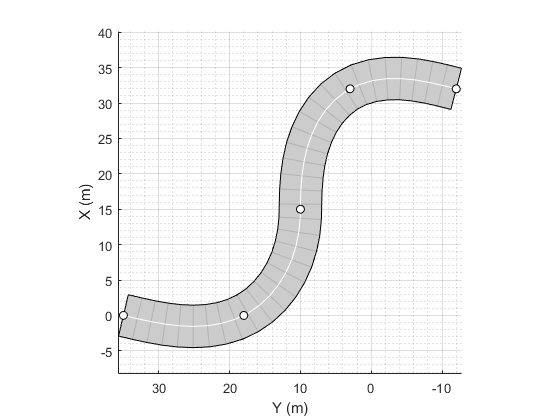
Now specify heading angles for each of the road center points in the road. Plot the new road.
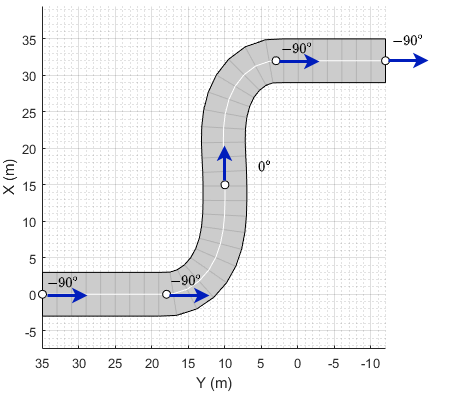
scenario = drivingScenario; roadCenters = [0 35; 0 18; 15 10; 32 3; 32 -12]; roadHeadings = [-90; -90; 0; -90; -90]; road(scenario,roadCenters,'Heading',roadHeadings); plot(scenario,'Centerline','on','RoadCenters','on')
This figure shows the road with the road heading angles and their respective road centers specified in the example.
Algorithms
The road function creates a road for an actor to follow in a
driving scenario. You specify the road using N two-dimensional or
three-dimensional waypoints. Each of the N – 1 segments between
waypoints defines a curve whose curvature varies linearly with distance along the
segment. The function fits a piecewise clothoid curve to the
(x, y) coordinates of the waypoints by
matching the curvature on both sides of the waypoint. For a nonclosed curve, the
curvature at the first and last waypoint is zero. If the first and last waypoints
coincide, then the curvatures before and after the endpoints are matched. The
z-coordinates of the road are interpolated using a
shape-preserving piecewise cubic curve.
Version History
Introduced in R2017a