setCosts
Set cost value of cells in vehicle costmap
Description
Examples
Create a 10-by-15 meter vehicle costmap. Cells have a side length of 1 meter.
costmap = vehicleCostmap(10,15);
Define a set of (x,y) coordinates that correspond to a 3-by-5 meter rectangle.
[x,y] = meshgrid(2:4,2:6); xyPoints = [x(:),y(:)];
Mark the rectangle as an obstacle by increasing the cost of its cells to 0.9.
costVal = 0.9;
setCosts(costmap,xyPoints,costVal);
plot(costmap)
title('Costmap with Rectangular Obstacle')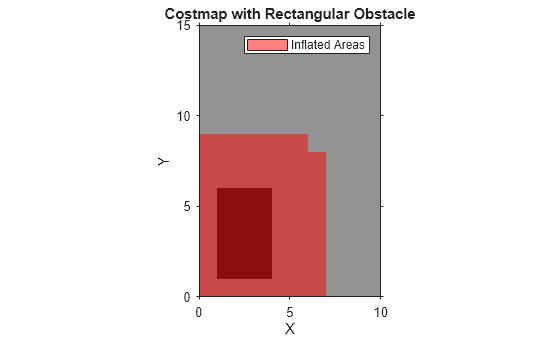
Input Arguments
Extended Capabilities
Version History
Introduced in R2018a