Visualize Sensor Data from Unreal Engine Simulation Environment
This example shows how to visualize sensor coverages and detections obtained from high-fidelity radar and lidar sensors in a 3D simulation environment. In this example, you learn how to:
Configure Simulink® models to simulate within the 3D environment. This environment is rendered using the Unreal Engine® from Epic Games®.
Read ground truth data and vehicle trajectories from a scenario authored using the Driving Scenario Designer app, and then recreate this scenario in the Simulink model.
Add radar and lidar sensors to these models by using Simulation 3D Probabilistic Radar and Simulation 3D Lidar blocks.
Visualize the driving scenario and generated sensor data in the Bird's-Eye Scope.
You can use these visualizations and sensor data to test and improve your automated driving algorithms. You can also extend this example to fuse detections and visualize object tracking results, as shown in the Sensor Fusion Using Synthetic Radar and Vision Data in Simulink example.
Inspect Cuboid Driving Scenario
In this example, the ground truth (roads, lanes, and actors) and vehicle trajectories come from a scenario that was authored in the Driving Scenario Designer app. In this app, vehicles and other actors are represented as simple box shapes called cuboids. For more details about authoring cuboid scenarios, see the Create Driving Scenario Interactively and Generate Synthetic Sensor Data example.
Open the cuboid driving scenario file in the app.
drivingScenarioDesigner('StraightRoadScenario.mat')
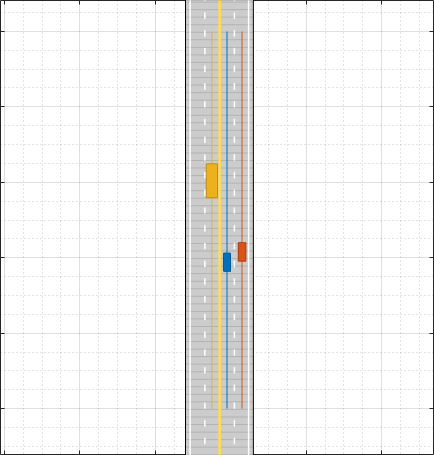
In the app, run the scenario simulation. In this scenario, the ego vehicle (a blue car) travels north along a straight road at a constant speed. In the adjacent lane, an orange car travels north at a slightly higher constant speed. In the opposite lane, a yellow truck drives south at a constant speed.
When authoring driving scenarios that you later recreate in the 3D simulation environment, you must use a road network identical to one from the default 3D scenes. Otherwise, in the recreated scenario, the positions of vehicles and sensors are inaccurate. This driving scenario uses a recreation of the Straight Road scene. To select a different cuboid version of a 3D scene, on the app toolstrip, select Open > Prebuilt Scenario > Simulation3D and choose from the available scenes. Not all 3D scenes have corresponding versions in the app.
For a list of supported scenes and additional details about each scene, see Cuboid Versions of 3D Simulation Scenes in Driving Scenario Designer.
To generate vehicle trajectories for scenes that are not available in the app, use the process described in the Select Waypoints for Unreal Engine Simulation example instead.
The dimensions of vehicles in the cuboid scenarios must also match the dimensions of one of the predefined 3D simulation vehicle types. On the app toolstrip, under 3D Display, the Use 3D Simulation Actor Dimensions selection sets each cuboid vehicle to have the dimensions of a 3D vehicle type. In this scenario, the vehicles have these 3D display types and corresponding vehicle dimensions.
Ego Vehicle— Sedan vehicle dimensionsVehicle in Adjacent Lane— Muscle Car vehicle dimensionsVehicle in Opposite Lane— Box Truck vehicle dimensions
To change a vehicle to a different display type, on the Actors tab in the left pane of the app, update the 3D Display Type parameter for that vehicle. To change the color of a vehicle, select the color patch next to the selected vehicle and choose a new color.
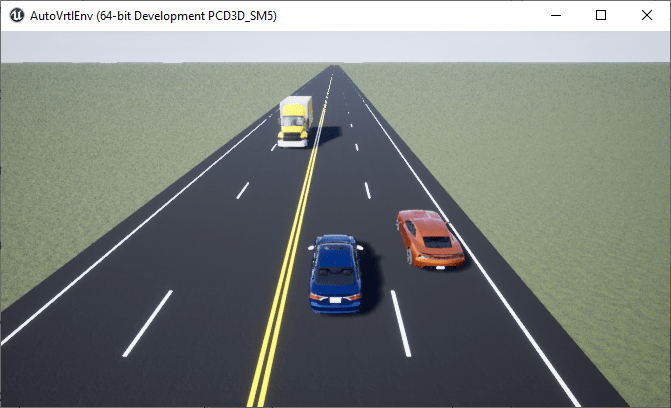
To preview how the vehicles display in the 3D environment, use the 3D display window available from the app. On the app toolstrip, select 3D Display > View Simulation in 3D Display and rerun the simulation.
Open 3D Simulation Model
The model used in this example recreates the cuboid driving scenario. The model also defines high-fidelity sensors that generate synthetic detections from the environment. Open the model.
open_system('Visualize3DSimulationSensorCoveragesDetections')Inspect Scene Configuration
The Simulation 3D Scene Configuration block configures the model to simulate in the 3D environment.
The Scene name parameter is set to the default
Straight roadscene. This scene corresponds to the cuboid version defined in the app scenario file.The Scene view parameter is set to
Ego Vehicle. During simulation, the 3D simulation window displays the scene from behind the ego vehicle.
The Scenario Reader block reads the ground truth data (road boundaries, lane markings, and actor poses) from the app scenario file. The Bird's-Eye Scope visualizes this ground truth data, not the ground truth data of the 3D simulation environment. To use the same scene for the cuboid and 3D simulation environments, the ground truth data for both environments must match. If you are creating a new scenario, you can generate a Scenario Reader block that reads data from your scenario file. First, open the scenario file in the Driving Scenario Designer app. Then, on the app toolstrip, select Export > Export Simulink Model. If you update the scenario, you do not need to generate a new Scenario Reader block.
The Simulation 3D Scene Configuration block and Scenario Reader block both have their Sample time parameter set to 0.1. In addition, all other 3D simulation vehicle and sensor blocks inherit their sample time from the Simulation 3D Scene Configuration block. By setting a single sample time across the entire model, the Bird's-Eye Scope displays data from all blocks at a constant rate. If the ground truth and sensor data have different sample times, then the scope visualizes them at different time intervals. This process causes the ground truth and sensor data visualizations to flicker.
Inspect Vehicle Configuration
The Simulation 3D Vehicle with Ground Following blocks specify the appearances and trajectories of the vehicles in the 3D simulation environment. Each vehicle is a direct counterpart to one of the vehicles defined in the Driving Scenario Designer app scenario file.
In the 3D environment, vehicle positions are in world coordinates. However, the Scenario Reader block outputs the poses of non-ego actors in ego vehicle coordinates. A Vehicle To World block converts these non-ego actor poses into world coordinates. Because the ego vehicle is output in world coordinates, this conversion is not necessary for the ego vehicle. For more details about the vehicle and world coordinate systems, see Coordinate Systems in Automated Driving Toolbox.
Locations of vehicle origins differ between cuboid and 3D scenarios.
In cuboid scenarios, the vehicle origin is on the ground, at the center of the rear axle.
In 3D scenarios, the vehicle origin is on ground, at the geometric center of the vehicle.
The Cuboid To 3D Simulation blocks convert the cuboid origin positions to the 3D simulation origin positions. In the ActorID used for conversion parameters of these blocks, the specified ActorID of each vehicle determines which vehicle origin to convert. The Scenario Reader block outputs ActorID values in its Actors output port. In the Driving Scenario Designer app, you can find the corresponding ActorID values on the Actors tab, in the actor selection list. The ActorID for each vehicle is the value that precedes the colon.
Each Cuboid To 3D Simulation block outputs X, Y, and Yaw values that feed directly into their corresponding vehicle blocks. In the 3D simulation environment, the ground terrain of the 3D scene determines the Z-position (elevation), roll angle, and pitch angle of the vehicles.
In each Simulation 3D Vehicle with Ground Following block, the Type parameter corresponds to the 3D Display Type selected for that vehicle in the app. In addition, the Color parameter corresponds to the vehicle color specified in the app. To maintain similar vehicle visualizations between the Bird's-Eye Scope and the 3D simulation window, the specified type and color must match. To change the color of a vehicle in the app, on the Actors tab, click the color patch to the right of the actor name in the actor selection list. Choose the color that most closely matches the colors available in the Color parameter of the Simulation 3D Vehicle with Ground Following block.
Inspect Sensor Configuration
The model includes two sensor blocks with default parameter settings. These blocks generate detections from the 3D simulation environment.
The Simulation 3D Probabilistic Radar sensor block generates object detections based on a statistical model. This sensor is mounted to the front bumper of the ego vehicle.
The Simulation 3D Lidar sensor block generates detections in the form of a point cloud. It also generates semantic segmentation label for each point in the detected point cloud. This sensor is mounted to the center of the roof of the ego vehicle.
Although you can specify sensors in the Driving Scenario Designer app and export them to Simulink, the exported blocks are not compatible with the 3D simulation environment. You must specify 3D simulation sensors in the model directly.
Simulate and Visualize Scenario
During simulation, you can visualize the scenario in both the 3D simulation window and the Bird's-Eye Scope.
First, open the scope. On the Simulink toolstrip, under Review Results, click Bird's-Eye Scope. Then, to find signals that the scope can display, click Find Signals.
To run the simulation, click Run in either the model or scope. When the simulation begins, it can take a few seconds for the 3D simulation window to initialize, especially when you run it for the first time in a Simulink session. When this window opens, it displays the scenario with high-fidelity graphics but does not display detections or sensor coverages.

The Bird's-Eye Scope displays detections and sensor coverages by using a cuboid representation. The radar coverage area and detections are in red. The lidar coverage area is in gray, and its point cloud detections display as a parula colormap.
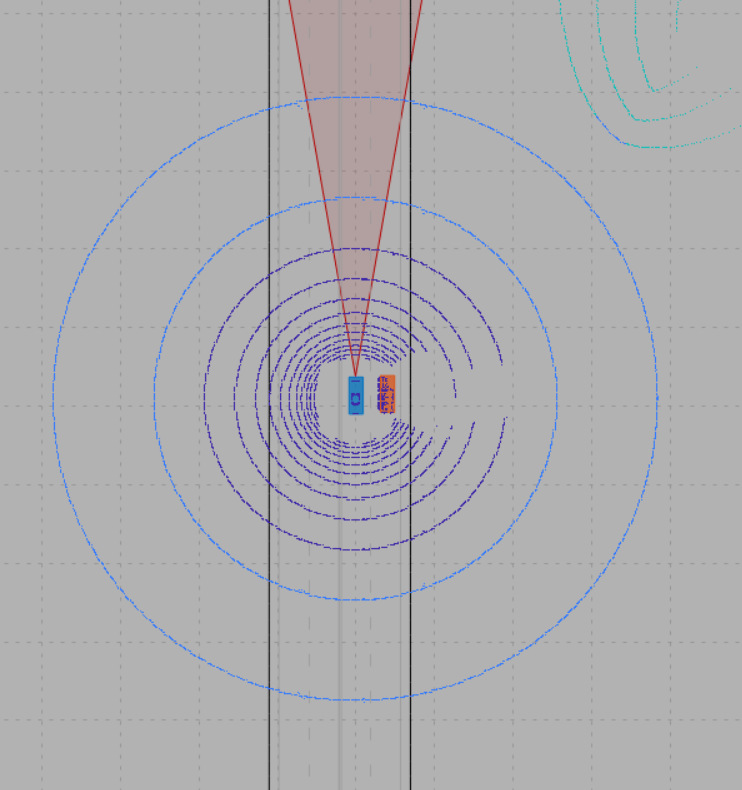
Simultaneously, the model creates a colormap using the semantic segmentation label outputs and visualizes the point cloud using that colormap. Note the road, vehicles and ground in different colors in the segmented point cloud.

The model runs the simulation at a pace of 0.5 seconds per wall-clock second. To adjust the pacing, from the Simulink toolstrip, select Run > Simulation Pacing, and then move the slider to increase or decrease the speed of the simulation.
Modify the Driving Scenario
When modifying your driving scenario, you might need to update the scenario in the Driving Scenario Designer app, the Simulink model, or in both places, depending on what you change.
Modify the road network — In the app, select a new prebuilt scene from the Simulation3D folder. Do not modify these road networks or the roads will not match the roads in the selected 3D scene. In the model, in the Simulation 3D Scene Configuration block, select the corresponding scene in the Scene name parameter.
Modify vehicle trajectories — In the app, modify the vehicle trajectories and resave the scenario. In the model, you do not need to update anything to account for this change. The Scenario Reader block automatically picks up these changes.
Modify vehicle appearances — In the app, update the color and 3D Display Type parameter of the vehicles. Also make sure that the 3D Display > Use 3D Simulation Actor Dimensions option is selected. In the model, update the Color and Type parameters of the corresponding Simulation 3D Vehicle with Ground Following blocks.
Add a new vehicle — In the app, create a new vehicle and specify a trajectory, color, and 3D display type. In the model, add a new Simulation 3D Vehicle with Ground Following block and corresponding Cuboid To 3D Simulation block. Set up these blocks similar to how the existing non-ego vehicles are set up. In the Cuboid To 3D Simulation block, set the
ActorIDof the new vehicle.Set a new ego vehicle — In the app, on the Actors tab, select the vehicle that you want to set as the ego vehicle and click Set As Ego Vehicle. In the model, in the Cuboid To 3D Simulation blocks, update the ActorID used for conversion parameters to account for which vehicle is the new ego vehicle. In the sensor blocks, set the Parent name parameters such that the sensors are mounted to the new ego vehicle.
Modify or add sensors — In the app, you do not need to make any changes. In the model, modify or add sensor blocks. When adding sensor blocks, set the Parent name of all sensors to the ego vehicle.
To visualize any updated scenario in the Bird's-Eye Scope, you must click Find Signals again. If you modify a scenario or are interested in only visualizing sensor data, consider turning off the 3D window during simulation. In the Simulation 3D Scene Configuration block, clear the Display 3D simulation window parameter.
See Also
Apps
Blocks
- Scenario Reader | Vehicle To World | Cuboid To 3D Simulation | Simulation 3D Scene Configuration | Simulation 3D Vehicle with Ground Following