trackOSPAMetric
Optimal subpattern assignment (OSPA) metric
Description
The trackOSPAMetric
System object™ computes the optimal subpattern assignment metric between a set of tracks and
the known truths. You can enable different types of OSPA metrics by configuring these properties:
Traditional OSPA — Specify the
Metricproperty as"OSPA"and specify theLabelingErrorproperty as0. The traditional OSPA metric, which evaluates instantaneous tracking performance, contains two components:Localization error component — Accounts for state estimation errors between assigned tracks and truths.
Cardinality error component— Accounts for the number of unassigned tracks and truths.
Labeled OSPA — Specify the
Metricproperty as"OSPA"and specify theLabelingErrorproperty as a positive scalar. The labeled OSPA (LOSPA) metric, which evaluates instantaneous tracking performance and includes penalties for incorrect assignments, contains three components:Localization error component — Accounts for state estimation errors between assigned tracks and truths.
Cardinality error component— Accounts for the number of unassigned tracks and truths.
Labeling error component — Accounts for the error of incorrect assignments.
OSPA(2) — Specify the
Metricproperty as"OSPA(2)". The OSPA(2) metric evaluates cumulative tracking performance for a duration of time.
For more details, see Algorithms and References.
To use trackOSPAMetric:
Create the
trackOSPAMetricobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
OSPAMetric = trackOSPAMetrictrackOSPAMetric
System object, OSPAMetric, with default property values.
OSPAMetric = trackOSPAMetric(Name,Value)trackOSPAMetric object using one or more
name-value pairs. For example, OSPAMetric =
trackOSPAMetric('CutoffDistance',5) creates a trackOSPAMetric
object with the cut off distance equal to 5. Enclose property names in single
quotes.
Properties
Usage
Syntax
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Load prerecorded track data and truth data.
load trackmetricex tracklog truthlog
Construct a trackOSPAMetric object.
tom = trackOSPAMetric;
Initialize output variables.
ospa = zeros(numel(tracklog),1); cardOspa = zeros(numel(tracklog),1); locOspa = zeros(numel(tracklog),1);
Calculate three OSPA components in a loop.
for i = 1:numel(tracklog) tracks = tracklog{i}; truths = truthlog{i}; [ospa(i), locOspa(i), cardOspa(i)] = tom(tracks, truths); end
Visualize the results.
figure() plot(ospa,'g'); hold on; plot(locOspa,'r:'); plot(cardOspa,'b--'); legend('OSPA','Localization OSPA','Cardinality OSPA');
![]()
Load prerecorded tracking data that includes tracks and truth trajectories into the workspace.
load ("ospa2TestLog.mat","trackLog","truthLog"); steps = numel(trackLog);
Show the tracks and truth trajectories. The recorded data contains three tracks and three truth trajectories.
positionSelector = [1 0 0 0 0 0;
0 0 1 0 0 0];
figure
hold on
for i = 1:steps
tracksi = trackLog{i};
if ~isempty(tracksi)
xyTrackPositions = positionSelector*[tracksi.State];
plot(xyTrackPositions(1,:),xyTrackPositions(2,:),"b.")
end
truthsi = truthLog{i};
if ~isempty(truthsi)
xyTtruthPositions = cat(1,truthsi.Position)';
plot(xyTtruthPositions(1,:),xyTtruthPositions(2,:),"r.")
end
end
xlabel("x (m)")
ylabel("y (m)")
title("Tracks vs. Truths")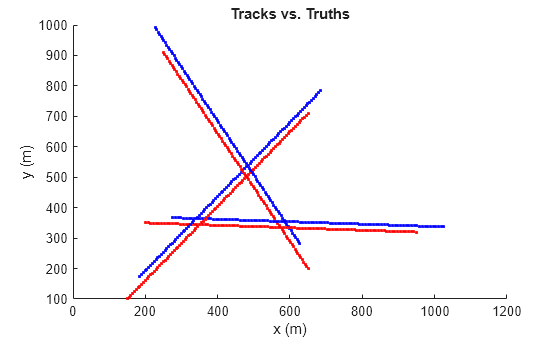
Create a trackOSPAMetric object and enable the metric. Specify the window length as 75.
ospa2Obj = trackOSPAMetric(Metric="OSPA(2)", ... WindowLength=75, ... CutoffDistance=50, ... WindowWeightExponent=3,... Order=1,... Distance="posabserr");
Loop over the data to obtain the metric over time.
ospa2 = NaN(steps,1); for i = 1:numel(trackLog) tracks = trackLog{i}; truths = truthLog{i}; ospa2(i) = ospa2Obj(tracks, truths); end
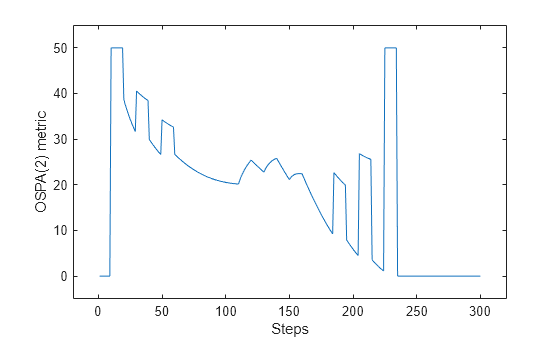
Visualize the results.
figure plot(ospa2) axis padded xlabel("Steps") ylabel("OSPA(2) metric")
Algorithms
References
[1] Schuhmacher, B., B. -T. Vo, and B. -N. Vo. "A Consistent Metric for Performance Evaluation of Multi-Object Filters." IEEE Transactions on Signal Processing, Vol, 56, No, 8, pp. 3447–3457, 2008.
[2] Ristic, B., B. -N. Vo, D. Clark, and B. -T. Vo. "A Metric for Performance Evaluation of Multi-Target Tracking Algorithms." IEEE Transactions on Signal Processing, Vol, 59, No, 7, pp. 3452–3457, 2011.
[3] M. Beard, B. -T. Vo, and B. -N. Vo. “OSPA (2) : Using the OSPA Metric to Evaluate Multi-Target Tracking Performance.” 2017 International Conference on Control, Automation and Information Sciences, IEEE, 2017, pp. 86–91.
Extended Capabilities
Version History
Introduced in R2019b