Tune Fuzzy Inference System at the Command Line
This example shows how to tune membership function (MF) and rule parameters of a Mamdani fuzzy inference system (FIS) at the MATLAB® command line. This example uses particle swarm and pattern search optimization, which require Global Optimization Toolbox software.
For this example, you tune a FIS using a two-step process.
Learn the rule base while keeping the input and output MF parameters constant.
Tune the parameters of the input and output MFs and rules.
The first step is less computationally expensive due to the small number of rule parameters, and it quickly converges to a fuzzy rule base during training. In the second step, using the rule base from the first step as an initial condition provides fast convergence of the parameter tuning process.
For an example that interactively tunes a FIS using the same data, see Tune Fuzzy Inference System Using Fuzzy Logic Designer.
For an example that programmatically tunes a FIS tree using the same data, see Tune FIS Tree at the Command Line.
Load Example Data
This example trains a FIS using automobile fuel consumption data. The goal is for the FIS to predict fuel consumption in miles per gallon (MPG) using several automobile profile attributes. The training data is available in the University of California at Irvine Machine Learning Repository and contains data collected from automobiles of various makes and models.
This example uses the following six input data attributes to predict the output data attribute MPG with a FIS:
Number of cylinders
Displacement
Horsepower
Weight
Acceleration
Model year
Load the data. Each row of the data set obtained from the repository represents a different automobile profile.
[data,name] = loadGasData;
data contains 7 columns, where the first six columns contain the input attribute values. The final column contains the predicted MPG output. Split data into input and output data sets, X and Y, respectively.
X = data(:,1:6); Y = data(:,7);
Partition the input and output data sets into training data (odd-indexed samples) and validation data (even-indexed samples).
trnX = X(1:2:end,:); % Training input data set trnY = Y(1:2:end,:); % Training output data set vldX = X(2:2:end,:); % Validation input data set vldY = Y(2:2:end,:); % Validation output data set
Extract the range of each data attribute, which you will use for input/output range definition during FIS construction.
dataRange = [min(data)' max(data)'];
Construct FIS Using Data Attribute Ranges
Create a Mamdani FIS for tuning.
fisin = mamfis;
Add input and output variables to the FIS, where each variable represents one of the data attributes. For each variable, use the corresponding attribute name and range.
To reduce the number of rules, use two MFs for each input variable, which results in input MF combinations. Therefore, the FIS uses a maximum of 64 rules corresponding to the input MF combinations.
To improve data generalization beyond the training data, use 64 MFs for the output variable. Doing so allows the FIS to use a different output MF for each rule.
Both input and output variables use default triangular MFs, which are uniformly distributed over the variable ranges.
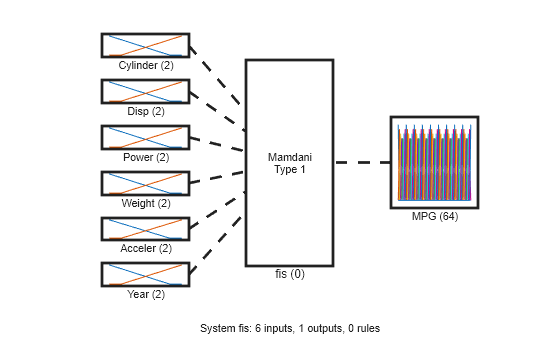
for i = 1:6 fisin = addInput(fisin,dataRange(i,:),Name=name(i),NumMFs=2); end fisin = addOutput(fisin,dataRange(7,:),Name=name(7),NumMFs=64);
View the FIS structure. Initially, the FIS has zero rules. The rules of the system are found during the tuning process.
figure plotfis(fisin)
Tune FIS with Training Data
Tuning is performed in two steps.
Learn the rule base while keeping the input and output MF parameters constant.
Tune the parameters of the input/output MFs and rules.
The first step is less computationally expensive due to the small number of rule parameters, and it quickly converges to a fuzzy rule base during training. In the second step, using the rule base from the first step as an initial condition provides fast convergence of the parameter tuning process.
Learn Rules
To learn a rule base, first specify tuning options using a tunefisOptions object. Since the FIS allows a large number of output MFs (used in rule consequents), use a global optimization method (genetic algorithm or particle swarm). Such methods perform better in large parameter tuning ranges as compared to local optimization methods (pattern search and simulation annealing). For this example, tune the FIS using the particle swarm optimization method ('particleswarm').
To learn new rules, set the OptimizationType to 'learning'. Restrict the maximum number of rules to 64. The number of tuned rules can be less than this limit, since the tuning process removes duplicate rules.
options = tunefisOptions( ... Method="particleswarm",... OptimizationType="learning", ... NumMaxRules=64);
If you have Parallel Computing Toolbox™ software, you can improve the speed of the tuning process by setting options.UseParallel to true. If you do not have Parallel Computing Toolbox software, set options.UseParallel to false.
Set the maximum number of iterations to 20. To reduce training error in the rule learning process, you can increase the number of iterations. However, using too many iterations can overtune the FIS to the training data, increasing the validation errors.
options.MethodOptions.MaxIterations = 20;
Since particle swarm optimization uses random search, to obtain reproducible results, initialize the random number generator to its default configuration.
rng("default")Tune the FIS using the specified tuning data and options.
Learning rules using the tunefis function takes approximately 5 minutes. For this example, enable tuning by setting runtunefis to true. To load pretrained results without running tunefis, you can set runtunefis to false.
runtunefis = false;
Parameter settings can be empty when learning new rules. For more information, see tunefis.
if runtunefis fisout1 = tunefis(fisin,[],trnX,trnY,options); %#ok<UNRCH> else tunedfis = load("tunedfismpgprediction.mat"); fisout1 = tunedfis.fisout1; fprintf("Training RMSE = %.3f MPG\n",calculateRMSE(fisout1,trnX,trnY)); end
Training RMSE = 4.452 MPG
The Best f(x) column shows the training root mean squared error (RMSE).
View the structure of the tuned FIS, fisout1.
plotfis(fisout1)
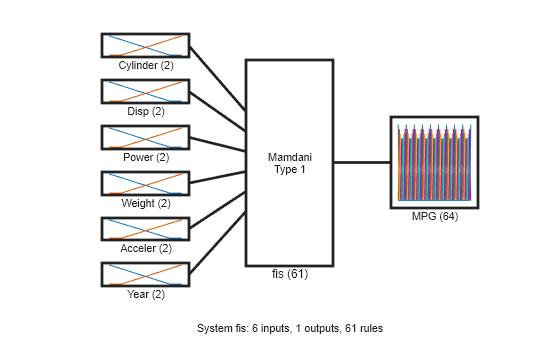
The learning process produces a set of new rules for the FIS. For example, view the descriptions of the first three rules.
[fisout1.Rules(1:3).Description]'
ans = 3×1 string
"Cylinder==mf2 & Disp==mf2 & Power==mf2 & Weight==mf2 & Year==mf2 => MPG=mf5 (1)"
"Cylinder==mf1 & Power==mf2 & Weight==mf2 & Acceler==mf2 & Year==mf1 => MPG=mf63 (1)"
"Cylinder==mf2 & Disp==mf1 & Acceler==mf2 => MPG=mf28 (1)"
The learned system should have similar RMSE performance for both the training and validation data sets. To calculate the RMSE for the validation data set, evaluate fisout1 using validation input data set vldX. To hide run-time warnings during evaluation, set all the warning options to none.
Calculate the RMSE between the generated output data and the validation output data set vldY.
plotActualAndExpectedResultsWithRMSE(fisout1,vldX,vldY)
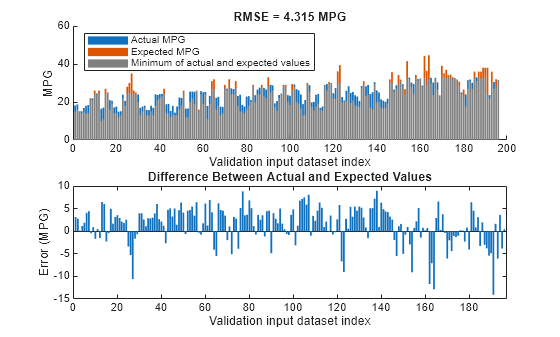
Since the training and validation errors are similar, the learned system does not overfit the training data.
Tune All Parameters
After learning the new rules, tune the input/output MF parameters along with the parameters of the learned rules. To obtain the tunable parameters of the FIS, use the getTunableSettings function.
[in,out,rule] = getTunableSettings(fisout1);
To tune the existing FIS parameter settings without learning new rules, set the OptimizationType to "tuning".
options.OptimizationType = "tuning";Since the FIS already learned rules using the training data, use a local optimization method for fast convergence of the parameter values. For this example, use the pattern search optimization method ("patternsearch").
options.Method = "patternsearch";Tuning the FIS parameters takes more iterations than the previous rule-learning step. Therefore, increase the maximum number of iterations of the tuning process to 60. As in the first tuning stage, you can reduce training errors by increasing the number of iterations. However, using too many iterations can overtune the parameters to the training data, increasing the validation errors.
options.MethodOptions.MaxIterations = 60;
To improve pattern search results, set method option UseCompletePoll to true.
options.MethodOptions.UseCompletePoll = true;
Tune the FIS parameters using the specified tunable settings, training data, and tuning options.
Tuning parameter values with tunefis function takes approximately 5 minutes. To load pretrained results without running tunefis, you can set runtunefis to false.
if runtunefis rng("default") %#ok<UNRCH> fisout = tunefis(fisout1,[in;out;rule],trnX,trnY,options); else fisout = tunedfis.fisout; fprintf("Training RMSE = %.3f MPG\n",calculateRMSE(fisout,trnX,trnY)); end
Training RMSE = 2.903 MPG
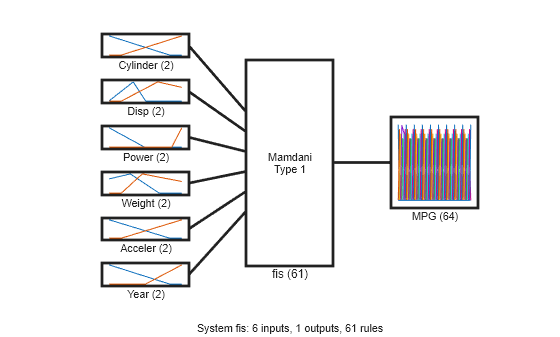
At the end of the tuning process, some of the tuned MF shapes are different than the original ones.
figure plotfis(fisout)
Check Performance
Validate the performance of the tuned FIS, fisout, using the validation input data set vldX.
Compare the expected MPG obtained from the validation output data set vldY and actual MPG generated using fisout. Compute the RMSE between these results.
plotActualAndExpectedResultsWithRMSE(fisout,vldX,vldY);
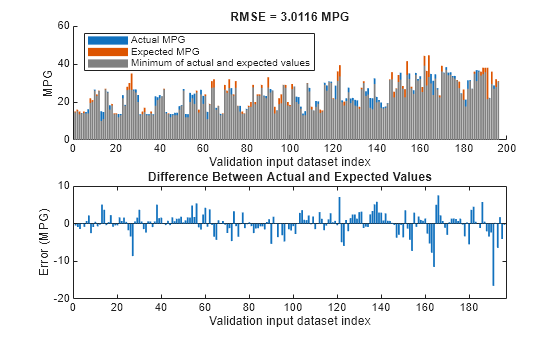
Tuning the FIS parameters improves the RMSE compared to the results from the initial learned rule base. Since the training and validation errors are similar, the parameters values are not overtuned.
Conclusion
You can further improve the training error of the tuned FIS by:
Increasing number of iterations in both the rule-learning and parameter-tuning phases. Doing so increases the duration of the optimization process and can also increase validation error due to overtuned system parameters with the training data.
Using global optimization methods, such as
gaandparticleswarm, in both rule-learning and parameter-tuning phases.gaandparticleswarmperform better for large parameter tuning ranges since they are global optimizers. On the other hand,patternsearchandsimulannealbndperform better for small parameter ranges since they are local optimizers. If a FIS is generated from training data withgenfisor a rule base is already added to a FIS using training data, thenpatternsearchandsimulannealbndmay produce faster convergence as compared togaandparticleswarm. For more information on these optimization methods and their options, seega(Global Optimization Toolbox),particleswarm(Global Optimization Toolbox),patternsearch(Global Optimization Toolbox), andsimulannealbnd(Global Optimization Toolbox).Changing the FIS properties, such as the type of FIS, number of inputs, number of input/output MFs, MF types, and number of rules. For fuzzy systems with a large number of inputs, a Sugeno FIS generally converges faster than a Mamdani FIS since a Sugeno system has fewer output MF parameters (if
constantMFs are used) and faster defuzzification. Small numbers of MFs and rules reduce the number of parameters to tune, producing a faster tuning process. Furthermore, a large number of rules may overfit the training data. In general, for larger fuzzy systems, a FIS tree can produce similar performance with a smaller number of rules as compared to a single FIS. For an example, see Tune FIS Tree at the Command Line.Modifying tunable parameter settings for MFs and rules. For example, you can tune the support of a triangular MF without changing its peak location. Doing so reduces the number of tunable parameters and can produce a faster tuning process for specific applications. For rules, you can exclude zero MF indices by setting the
AllowEmptytunable setting tofalse, which reduces the overall number of rules during the learning phase.
Local Functions
function plotActualAndExpectedResultsWithRMSE(fis,x,y) % Calculate RMSE between actual and expected results. [rmse,actY] = calculateRMSE(fis,x,y); % Plot results figure subplot(2,1,1) hold on bar(actY) bar(y) bar(min(actY,y),FaceColor=[0.5 0.5 0.5]) hold off axis([0 200 0 60]) xlabel("Validation input dataset index"), ylabel("MPG") legend(["Actual MPG" "Expected MPG" "Minimum of actual and expected values"],... Location="NorthWest") title("RMSE = " + num2str(rmse) + " MPG") subplot(2,1,2) bar(actY-y) xlabel("Validation input dataset index") ylabel("Error (MPG)") title("Difference Between Actual and Expected Values") end function [rmse,actY] = calculateRMSE(fis,x,y) % Specify options for FIS evaluation. persistent evalOptions if isempty(evalOptions) evalOptions = evalfisOptions( ... EmptyOutputFuzzySetMessage="none", ... NoRuleFiredMessage="none", ... OutOfRangeInputValueMessage="none"); end % Evaluate FIS. actY = evalfis(fis,x,evalOptions); % Calculate RMSE. del = actY - y; rmse = sqrt(mean(del.^2)); end
See Also
tunefis | getTunableSettings | genfis